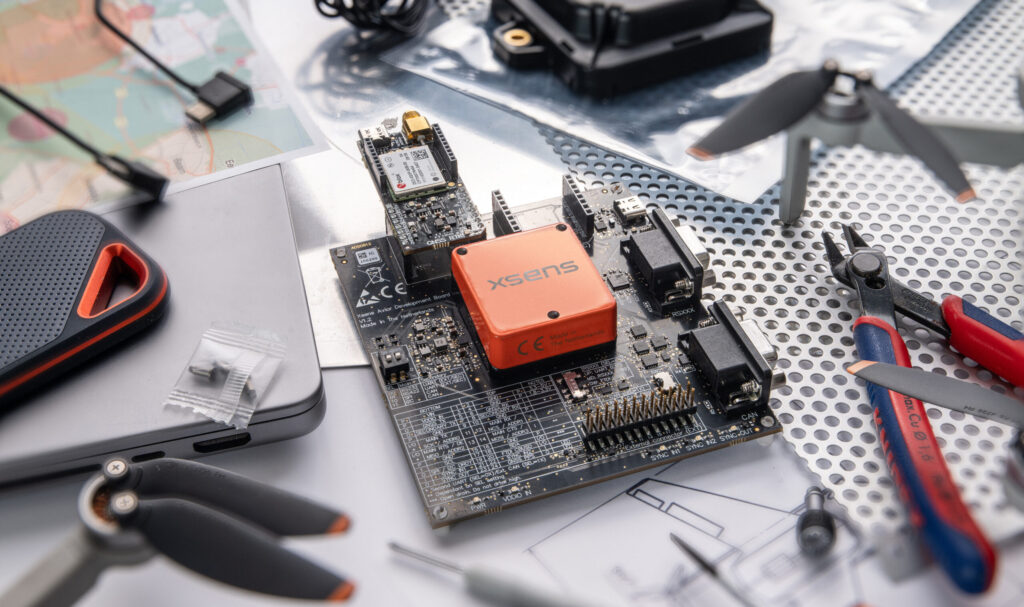
A newly released integration guide from Xsens outlines the precise technical steps required to implement high‑performance motion-sensing modules into unmanned aerial vehicles utilizing Pixhawk flight controllers and ArduPilot software.
The technical resource focuses on the seamless deployment of Xsens Inertial Measurement Units (IMUs), Attitude and Heading Reference Systems (AHRS), and Global Navigation Satellite System/Inertial Navigation System (GNSS/INS) modules. For engineering teams, the guide provides critical data on physical wiring, specific software parameter configurations, and system verification protocols. Utilizing these external sensors provides high‑frequency orientation outputs reaching up to 400 Hz alongside low‑latency data, which together establish highly responsive and stable flight control loops.
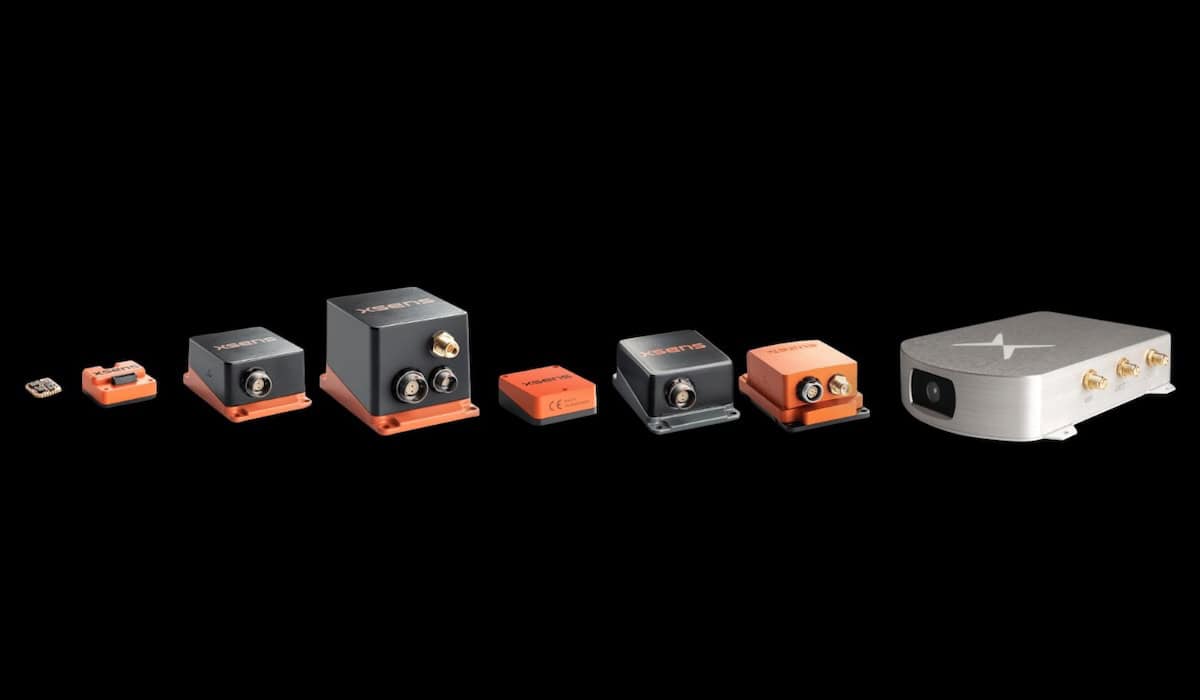
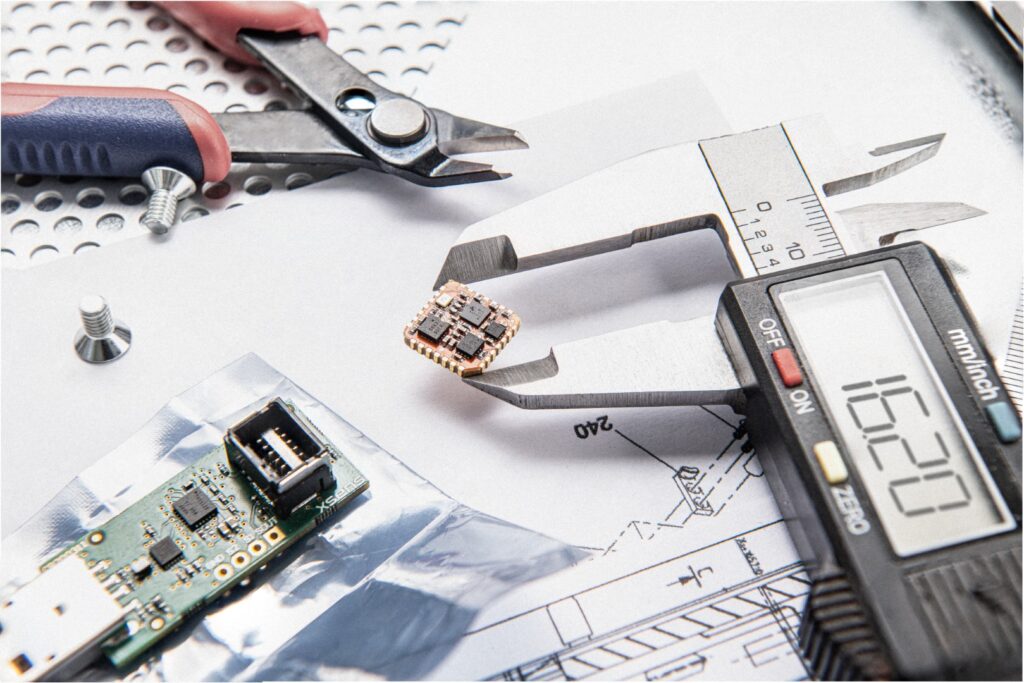
Designed for straightforward integration with Pixhawk, ArduPilot, and Robot Operating System (ROS) environments, these compact sensors allow developers to prioritize high‑level mission objectives over low‑level sensor programming. Detailed compatibility tables and specifications span a diverse portfolio of hardware, ranging from the ultra‑compact MTi 1‑Series modules up to the rugged MTi 600‑Series devices and the MTi‑G‑710.
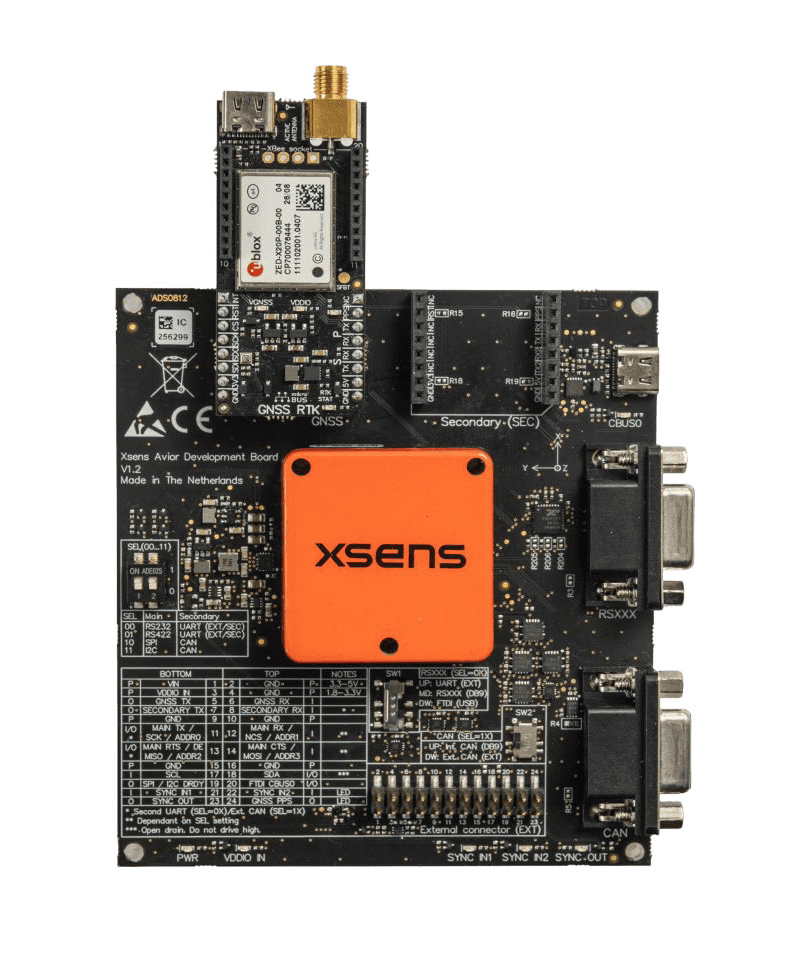
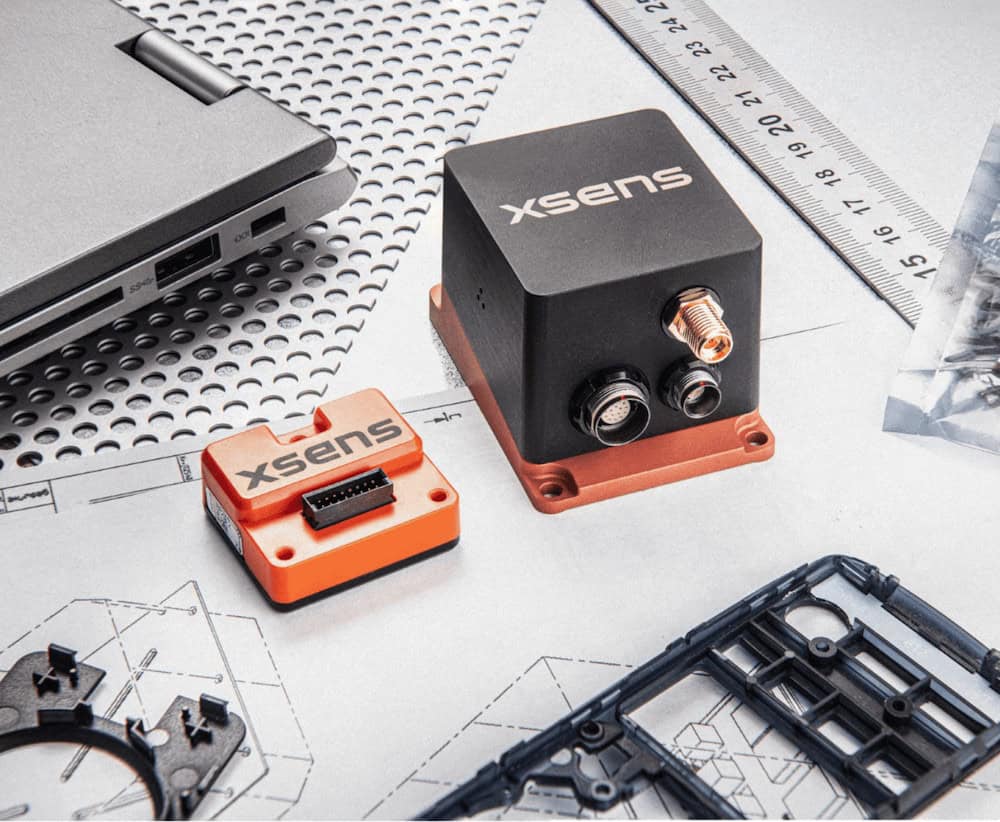
The integration documentation also introduces setup procedures for the rugged Xsens Sirius GNSS/INS and Xsens Sirius RTK GNSS/INS units. These specific modules feature integrated u‑blox ZED‑X20 receivers and support high‑speed output rates of up to 2 kHz. In terms of precise positioning capabilities, the standard Sirius module delivers 1 m Circular Error Probable (CEP) with 0.8° Root Mean Square (RMS) heading, while the Sirius RTK variant achieves 0.6 cm + 1 ppm CEP with 0.5° RMS heading.
Engineers connecting the Sirius modules to a Pixhawk flight controller must utilize an external level converter, as these rugged units communicate via RS232/RS422 or CAN(-FD) interfaces rather than standard Pixhawk UART voltage levels.
Reliable and accurate orientation data remains a critical requirement for navigating autonomous drones safely through complex environments. Drawing upon 25 years of motion‑sensing expertise, the individually calibrated sensors ensure the high reliability and robust performance necessary for advanced Pixhawk‑based UAV operations.