SBG Systems’ Ekinox2-D dual-antenna GNSS-aided INS (Inertial Navigation System) has been integrated into Poland’s first autonomous hydrographic USV (unmanned surface vessel). The HydroDron platform is an unmanned catamaran with a 4m long and 2m wide double hull, constructed from lightweight and durable materials. It is designed to make hydrographic measurements in waters that may be difficult or impossible to reach for larger vessels.
The highly mobile USV, which can reach a speed of over 10 knots, can be transported and launched from a car trailer or a larger manned vessel. Featuring autonomous navigation and automatic 3D hydrography, it uses adaptive trajectory planning and automatic 3D analysis of near real-time situational data to perform bathymetric, sonar, and other measurement missions.
SBG’s Ekinox2-D, featuring a survey-grade IMU and dual-antenna RTK GNSS receiver, provides the vessel with orientation, heave, and centimeter-accurate position data. The low SWaP (size, weight and power) footprint and robust IP68-rated enclosure make it ideal for space-constrained and challenging applications such as USVs and other unmanned systems.
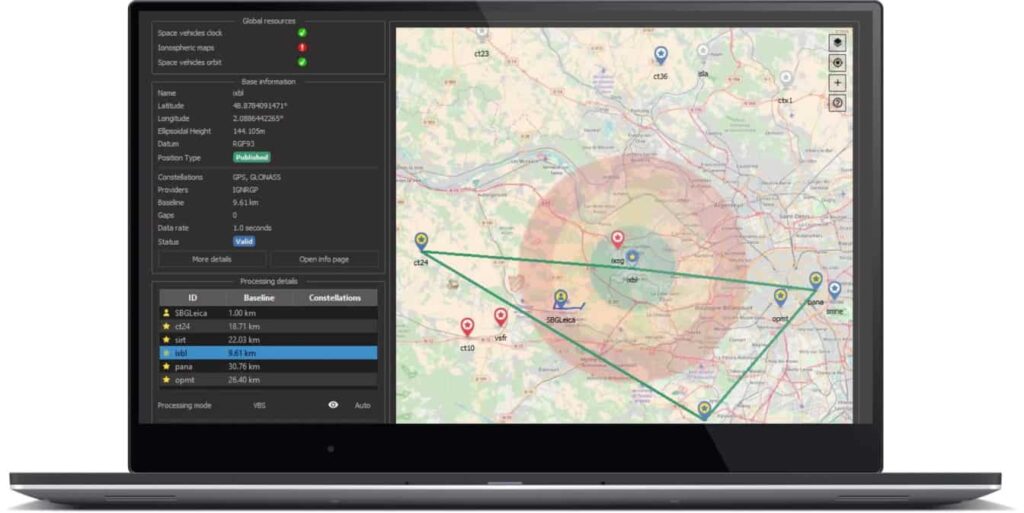
The Ekinox2-D also incorporates an 8 GB data logger for post-operation analysis or post-processing. Data can also be post-processed with SBG’s in-house Qinertia PPK software, which enhances INS performance by combining inertial data with raw GNSS observables. The software gives access to offline up-to-date RTK corrections from more than 7,000 base stations located in 164 countries.
In addition to the Ekinox2-D, the HydroDron also integrates a wide range of other measuring equipment to provide mission flexibility:
- Ping DSP 3DSS-DX-450 integrated bathymetric and sonar system
- Getac S410 industrial computer for data acquisition
- HydroBox HD single-beam dual-frequency sonar from Syqwest
- Echologger EU400 high-frequency single-beam sonar
- Velodyne VLP-16 LiDAR
The sensor system that monitors the environment on and around the platform to provide increased situational awareness includes two vertical probes, two video cameras (rotating and stationary), and a weather station. In addition to typical navigation data, video data from both cameras, weather information, battery voltage level, and current depths under each float are recorded. Radar and two laser rangefinders (bow and stern) are used in the unit’s anti-collision system. Navigation data is transmitted to the shore station, which consists of two consoles: a dedicated navigation console, and a hydrographic console based on the Getac computer.