Besides operating with additional input from GNSS to increase dynamic accuracy and orientation calculation while manoeuvring, the new system is capable of measuring and outputting: Horizontal and Vertical Positions; Velocity; Heading, Attitude and IMU data. The AHRS-II-P can also acquire aiding data such as external standalone Magnetic Compass data, GNSS on-ground tracking, Doppler Velocity Log or Doppler shift from locator data.
The AHRS-II-P is a compact, lightweight solution with 1 deg/hr gyroscope bias in-run stability (RMS, Allan Variance) and <30 deg/hr bias residual error over its operating temperature range. With registered results from accelerometers of 0.005 mg bias in-run stability (RMS, Allan Variance) and 0.5 mg bias residual error over its -40°C to 70°C operational temperature range, the AHRS-II-P records and transmits high precision Pitch and Roll with 0.3 deg RMS dynamic accuracy, making it ideal for demanding EOS stabilization and Line of Sight pointing applications.
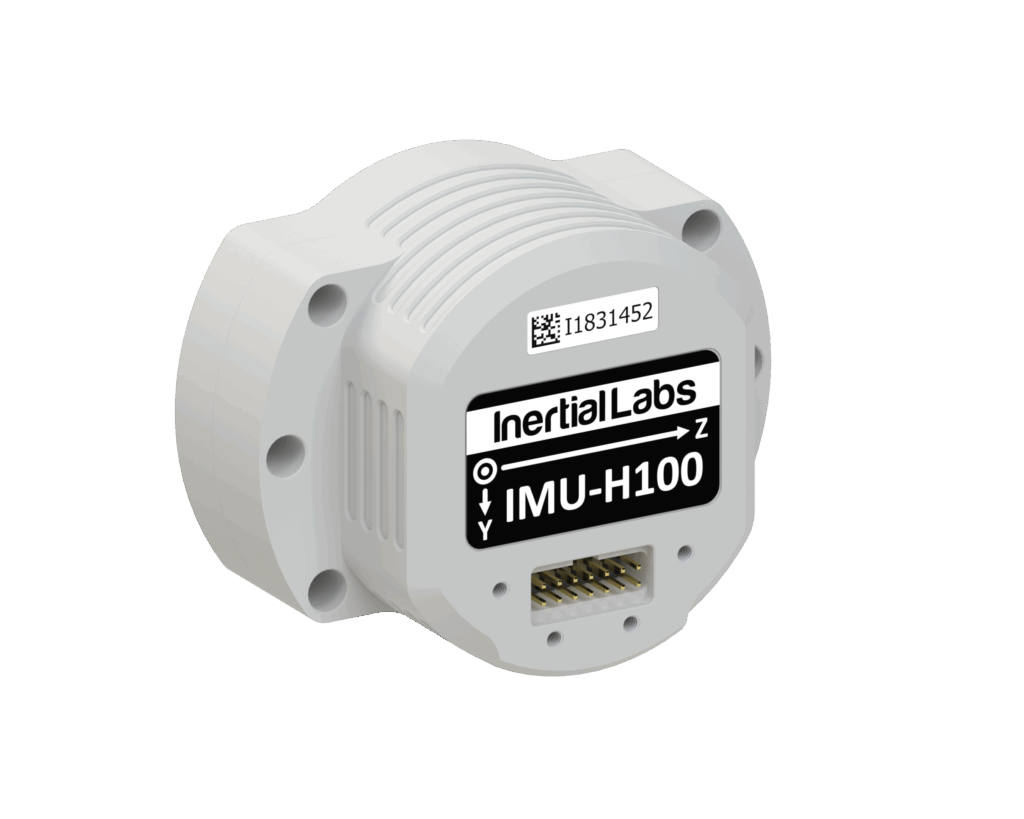
The Inertial Measurement Unit component of the system is a tactical grade IMU developed by Inertial Labs, which is a highly suitable fit for tactical guidance, navigation, flight control, stabilization, pointing systems and other applications. With Angular Rates and Accelerations data transfer rate reaching up to 2000 Hz, the low power consuming IMU provides an excellent SWAP-C advantage over legacy IMUs based off tactical grade fiber-optic gyros (FOG).
AHRS-II-P employs an 8mm Fluxgate gyro-compensated Magnetic Compass which has a distinct advantage over commonly used magneto-inductive or magneto-resistive magnetometers. Taking in data from an external GNSS receiver, AHRS-II-P is able to update the magnetic declination value automatically. With 0.2 nT Bias in-run stability and 0.3 nT√Hz Noise density, the fluxgate gyro-compensated magnetic compass of AHRS-II-P has excellent stability and repeatability.
With sophisticated internal calibration algorithms, the AHRS-II-P requires no additional equipment for field calibration. A quick calibration procedure is followed once the AHRS-II-P is mounted onto a moving base, and allows for calibrating the unit during its ordinary operation with no interruption of on-going orientation calculation and output.