KVH’s Guide to Comparing Gyros – click to download PDF
KVH Industries, Inc., a developer of sensors and integrated inertial systems, has released a technical whitepaper that offers guidance to engineers designing gyro-stabilized systems for manned or unmanned applications.
The paper compares gyro and inertial measurement technologies using distinct performance criteria of fiber optic gyros (FOGs) and FOG-based inertial systems, and micro-electro-mechanical systems (MEMS)-based gyros and MEMS inertial systems. It focuses on the five key critical performance areas of industrial and tactical grade gyros, as well as current and trending applications for both FOGs and MEMS.
Designers and engineers must compare the attributes of various gyro technologies, to determine which sensors meet the required performance and accuracy requirements; therefore a reliable means of comparing common critical performance parameters is an important tool.
Download the full whitepaper (opens in PDF).
Key Gyro Performance Factors
The paper covers in detail five critical areas in which industrial/tactical grade gyros must outperform consumer grade gyros while maintaining small form factor and low cost:
- Noise or Angle Random Walk (ARW)
- Bias Offset Error
- Bias Instability
- Temperature Sensitivity
- Shock and Vibration Sensitivity.
Traditional and Trending Applications
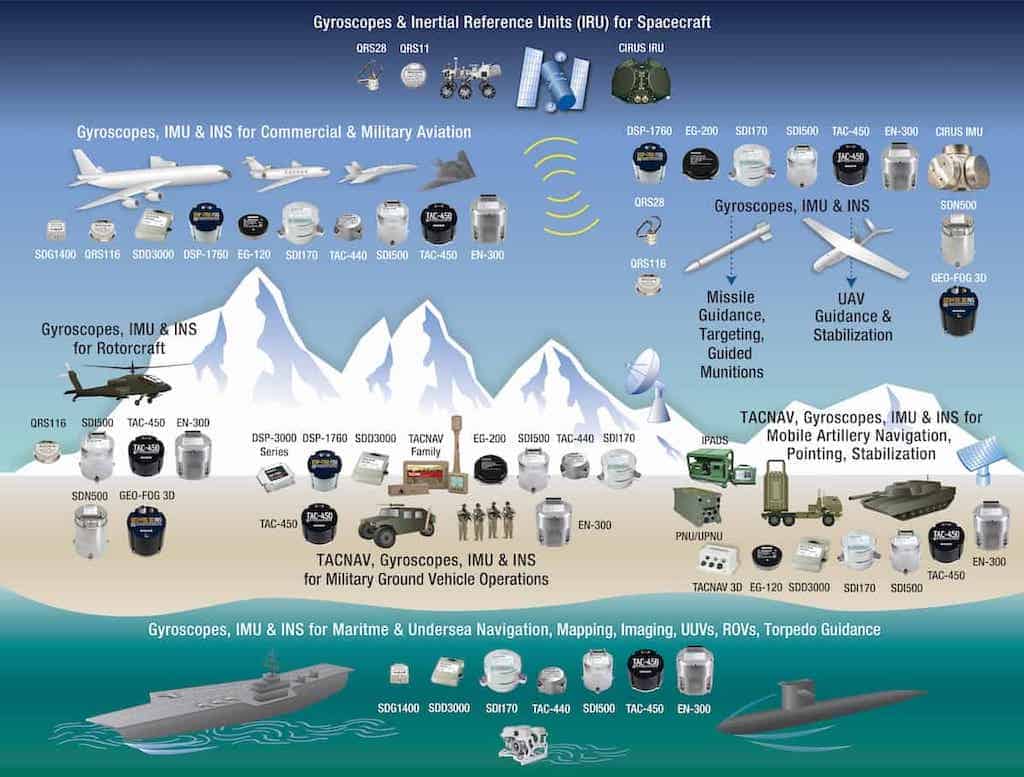
FOGs are used in motion sensing, pointing, stabilization, and navigation for unmanned and manned applications, GNSS/INS integration systems, payloads for Unmanned Aerial
Vehicles (UAVs), long-range optical and sensor systems, and high-accuracy inertial navigation systems.
FOG-based IMUs with low bias offset and excellent thermal bias stability are typically the choice for such demanding applications as antenna, optical equipment and laser system pointing and stabilization, GNSS-aiding, unmanned vehicle stabilization and navigation, EO/FLIR, land, sea, aerial mobile mapping and surveying, flight control, and altitude, heading and reference systems (AHRS).
The future of driverless vehicle technology requires the superior bias and scale factor stability offered by high performance FOGs and FOG-based IMUs. These applications
include driver-assist systems for self-parking, collision avoidance, and auto-braking, as well as vehicle-to-vehicle applications such as safe road trains and connected driver systems.
MEMS-based IMUs are commonly used for industrial-grade applications including miniaturized AHRS, and low/moderate pointing and positioning systems. MEMS are being tested for short-term mission duration, stabilization, control, and navigation of GPS/sensor-aided autonomous platforms.
Download the full whitepaper (opens in PDF).
KVH FOGs and IMUs are the choice of engineers designing higher performance systems for a wide variety of challenging applications including robotics, remote weapons systems, inertial navigation in GNSS-denied environments, unmanned land, air, and ground vehicles, and driverless car technology. Find out more >