The Defense Innovation Unit (DIU), in partnership with Marine Corps Systems Command (MCSC), and the Office of the Deputy DoD CTO for Mission Capabilities, has selected two solutions to advance into a competitive rapid prototyping effort to create an Autonomous Amphibious Response Vehicle (A2RV).
Bayonet Ocean Vehicles, as partner on this with Greensea, is one of two solutions chosen out of 67, to advance.
The A2RV will be a state-of-the-art amphibious unmanned system capable of detecting, identifying, localizing, inspecting, and neutralizing explosive hazards from very shallow water through the surf zone to the beach exit.
The A2RV will provide U.S. Marine Corps (USMC) Commanders with various unmanned capabilities to include clearance of explosive hazards from ship-to-shore, shore-to-ship, ship-to-ship, and shore-to-shore employment conditions and will complement other capabilities, interoperating with unmanned underwater vehicles, remote operated vehicles, unmanned surface vehicles, and Explosive Ordnance Disposal technicians as part of the Littoral Explosive Ordnance Neutralization (LEON) Program of Record.
Greensea Systems and Nauticus Robotics will deliver the following prototype vehicles to the USMC for user evaluation by Fall 2023.
Prototype Bayonet-250 Crawler
Greensea, in partnership with Bayonet Ocean Vehicles, will deliver a prototype Bayonet-250 crawler based on a mature commercial platform. The ATR (automatic target recognition) of this solution is done in partnership with SeeByte.
Terranaut Concept Vehicle
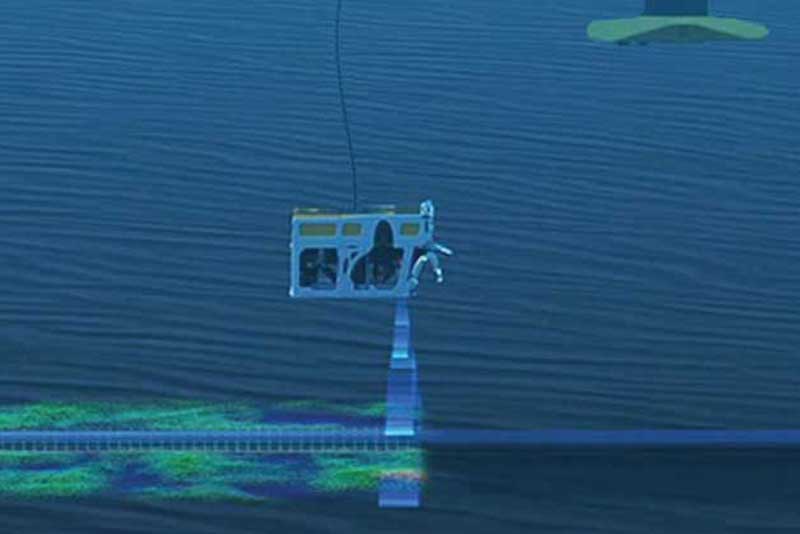
Nauticus Robotics, in partnership with VideoRay, will design and build the “Terranaut” concept vehicle, which provides the ability to crawl on the seafloor, and navigate through the water column using thrusters.
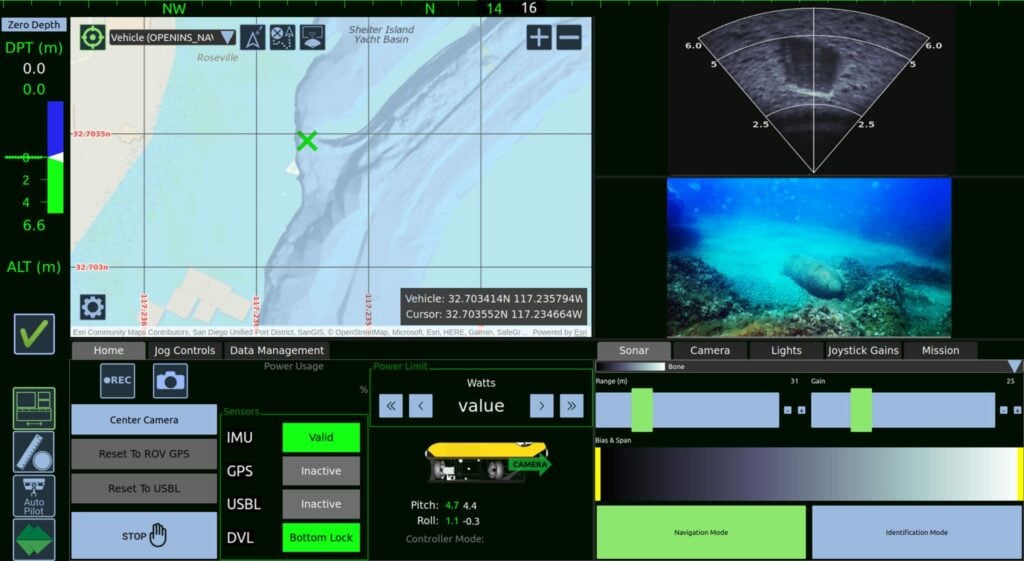
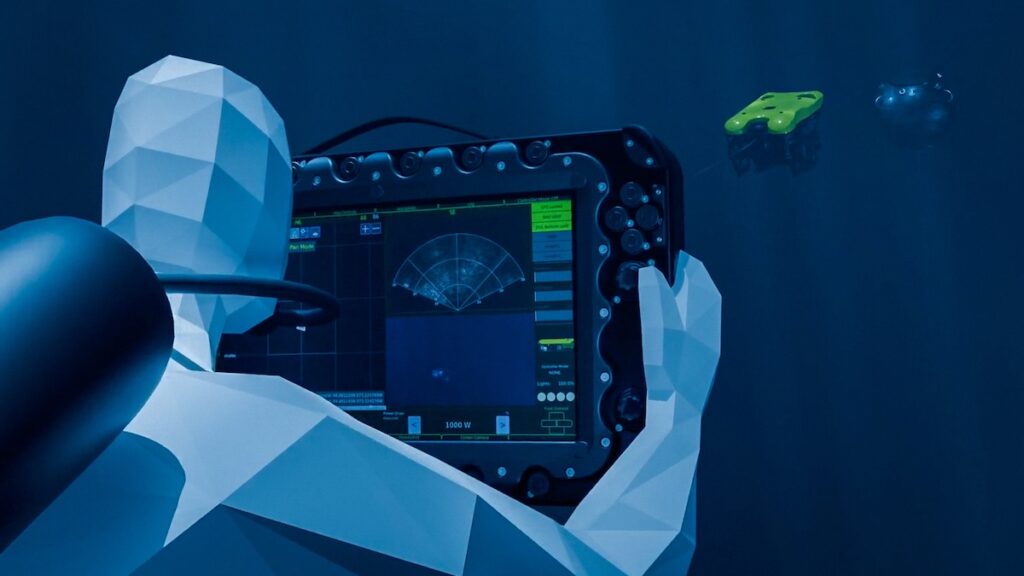
Both vehicles will integrate with USMC Mission Command systems, and adhere to open architecture principles for interoperability. The diverse technical approaches of the two companies provide the USMC with optionality and risk reduction, while delivering the key features required to complete the mission.