Farsounder has released the following article explaining how its Argos series of 3D forward looking navigation sonars can help meet the challenges of underwater obstacle detection in shallow water environments.
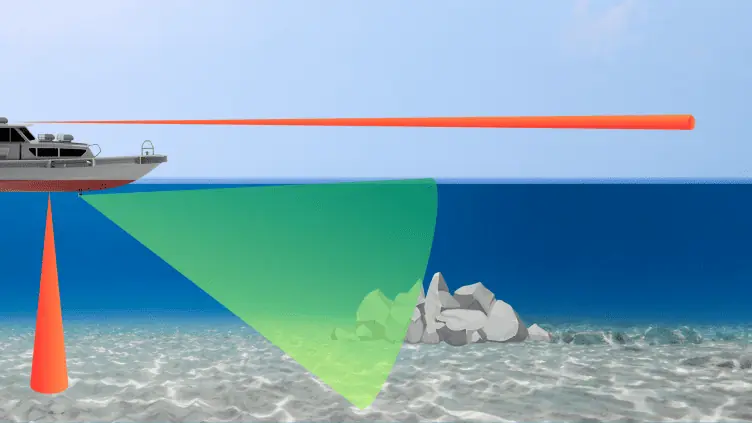
To be effective for shallow water navigation, a forward looking sonar should be capabile of detecting from the sea surface to the sea floor while also having a wide field-of-view and fast update rate.
Historically, the use of unmanned surface vessels (USV) began in very controlled environments where the seafloor was well mapped and the underwater environment was stable. The focus of these early USV projects was primarily on the integration of above water sensors with the vehicle control system and on the development of automated path planning. In the development of these systems, it was clear that successfully navigating through a dynamic environment while following all COLREGS would form the fundamental basis of all USV capabilities. By starting in these very controlled environments, collision avoidance requirements could be simplified by ignoring the threat of underwater obstacles.
As these early projects progressed, USV applications quickly expanded to deep water locations which offered new challenges related to operating in harsher, open water environments and farther from shore based communications. However, the majority of these deep water USV programs were able to still ignore underwater obstacles by avoiding the ice of high latitudes and operating at slow speeds to mitigate threats from lost shipping containers or large whales.
Over the past few years, basic above water sensor fusion and COLREGS compliance have been demonstrated and USVs are now seen as viable platforms for a growing number of applications. With these experiences under their belts, USV platform developers and users are looking to expand the use of USVs into more complex environments. Furthermore, many USV platforms are entering the market which promise higher operation speeds. As missions expand to long duration coastal monitoring, security patrols in austere ports, force projection into higher latitudes, ship-to-shore wayfinding, and high speed interdiction, consideration of underwater navigation hazards is becoming a priority for many USV operators.
One might ask ‘why can’t these USVs simply use electronic nautical charts (ENCs) as a map to avoid underwater obstacles?’ Though digital charts might seem the obvious answer, this solution is limited because so much of the world’s oceans are poorly mapped or even completely unmapped. The latest announcement by HSH Prince Albert II of Monaco during the most recent International Hydrographic Organization (IHO) Assembly of the GEBCO world map, puts the tally at just under 25% of the world’s oceans being mapped (1). However, this coverage rate is only at 100 meter resolution (which is not good enough for navigation) and much of the collected data is from old surveys using outdated approaches prone to large errors. Globally, less than 10% of the ocean has been mapped using modern sonar technology. The US can boast that it has mapped about 52% of its waters (2), yet only about 35% has been mapped with modern methods (3). In littoral waters, only about 50% have been mapped globally (4). These are the specific locations where underwater obstacles pose a grave threat to many types of vessels, including USVs. Furthermore, ENCs cannot account for transient obstacles such as whales, ice, and containers, all of which are critical to avoid as operational speeds increase.

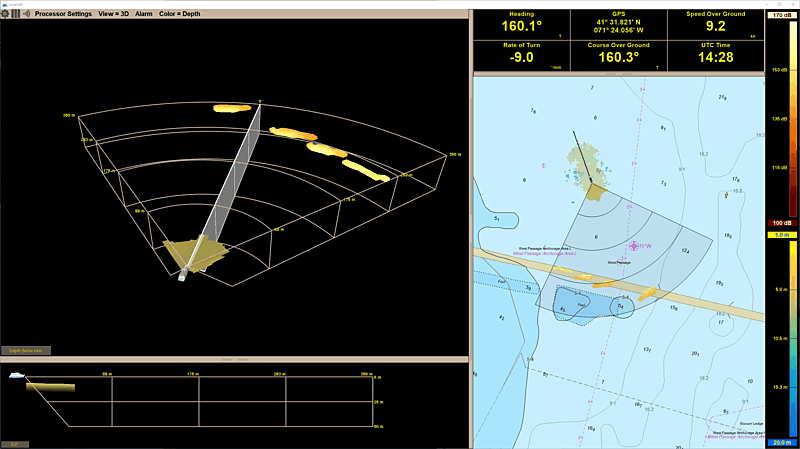
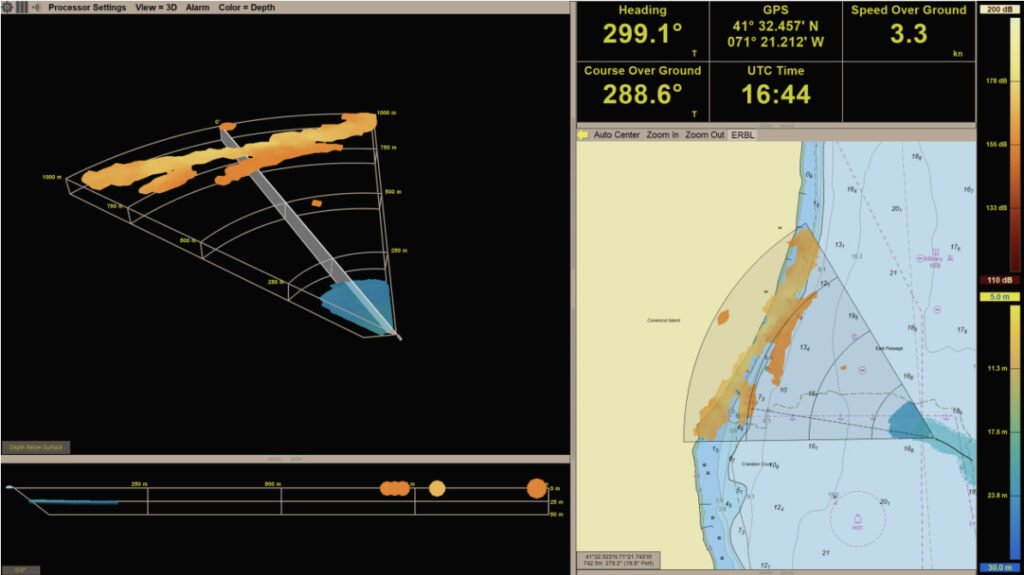
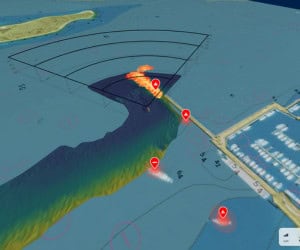
FarSounder’s Argos sonars generate realtime 3D FLS images ahead of the vessel while also generating a 3D map of everywhere the vessel goes.
FarSounder’s Argos series of 3D forward looking navigation sonars have been developed specifically to meet the challenges of underwater obstacle detection in shallow water environments. Argos sonars can detect obstacles ahead of the vessel with maximum operational ranges from 350 meters (>1000 feet) to 1000 meters (>½ nautical mile) depending upon the model. All models offer real-time detection of the seafloor in 3D as well as in-water targets from the sea surface to 85 meters depth. They also include FarSounder’s Local History Mapping functionality which generates a gridded bathymetric survey everywhere the vessel goes.
The SonaSoft software which runs the Argos sonars provides all the system processing and includes both a graphical user interface and a network based machine interface. The user interface offers easy to use and simple to understand human-in-the-loop capabilities. The user display software includes a 3D view of both the 3D Forward Looking Sonar (3D FLS) data and Local History Mapping (LHM) data. While the software’s chart view includes overlays of 3D FLS, LHM, AIS, and ARPA data.

FarSounder’s user interface software includes both a 3D View and Chart Overlay View.
The machine interface enables 3rd party systems (such as vehicle control systems for autonomous and semi-autonomous operation) to access a 3D point cloud of the fully processed sonar information via a standard Ethernet connection. This same network interface allows the system to connect directly to the QPS ecosystem via Qinsy for hydrographic survey applications and to a variety of ECDIS products for integrated bridge system applications.
All models of Argos navigation sonars are suitable for USV applications with the Argos 500 and Argos 1000 typically used on LUSV and XLUSV platforms. While the latest model in the series, the Argos 350, has been designed with smaller USV platforms in mind. The Argos 350’s Transducer Module can be configured with a top mounted connector which facilitates installation via a hoist mechanism.
Regardless of the USV platform size, when operating in shallow water, at higher speeds, or with mission critical payloads, avoiding underwater hazards is an important capability for many of today’s (and future) unmanned applications. By integrating a 3D forward looking sonar into the USV sensor suite, operators are able access a wider variety of environments more safely. This capability makes the USV platform more flexible for a wider range of applications. At the end of the day, expanding capabilities while reducing risk increases the overall ROI of the vehicle and mission.
(1) https://seabed2030.org/mapping-progress
(2) https://iocm.noaa.gov/seabed-2030-status.html
(3) https://oceanservice.noaa.gov/facts/exploration.html
(4) https://ihr.iho.int/articles/a-commitment-to-crowdsourced-bathymetry-citizen-sourced-data-help-reveal-the-deep-and-share-your-data/