Embention highlights its Veronte Autopilot 4x as a highly reliable, 'fail-operational' system with advanced redundancy and safety features, ensuring continuous and dependable control in critical applicationsembentionNewsFeature Article by Embention
Follow UST
Share this
The Veronte Autopilot 4x from systems developer Embention is a high-reliability control system designed to withstand basic failures, ensuring a ‘fail-operational’ performance even if an issue arises with the referee.
Power Redundancy
Power redundancy is critical for maintaining system reliability. The Veronte Autopilot 4x features four power inputs: one for each of the three cores and an additional one for the referees. Each core is independently powered and includes fuse protections to ensure that a failure in one core’s power supply does not impact the others.
The referees also benefit from power redundancy, with duplicated feed pins for each core. Independent power domains are established for internal peripherals, distributing power to various components in a reliable and fault-tolerant manner.
Redundancy 3+1
The Veronte Autopilot 4x comprises three internal cores (Veronte Autopilot 1x) and allows for the connection of a fourth external autopilot, either from Embention or another manufacturer.
All autopilots have the capability to control the vehicle, with the arbitration stage determining which core should take control based on a redundancy strategy. In the event of a core failure, the referees will detect it and select the appropriate core to maintain vehicle control.
Redundancy Management
The referees receive data from the various autopilot cores, each of which conducts built-in self-diagnosis tests (BITs) and communicates its status through a watchdog signal, helping to identify malfunctions. The cores send status updates and voting data to the referees via two redundant communication buses, which the referees use to decide which core should control the vehicle.
Robustness to Referee Faults
In the unlikely event of a failure in one of the referees, there are safeguards in place to ensure that one autopilot will always remain in control. If the referee fails to generate an output signal, Core 1 is selected by default. Since the referee has failed, no further core failures are anticipated.
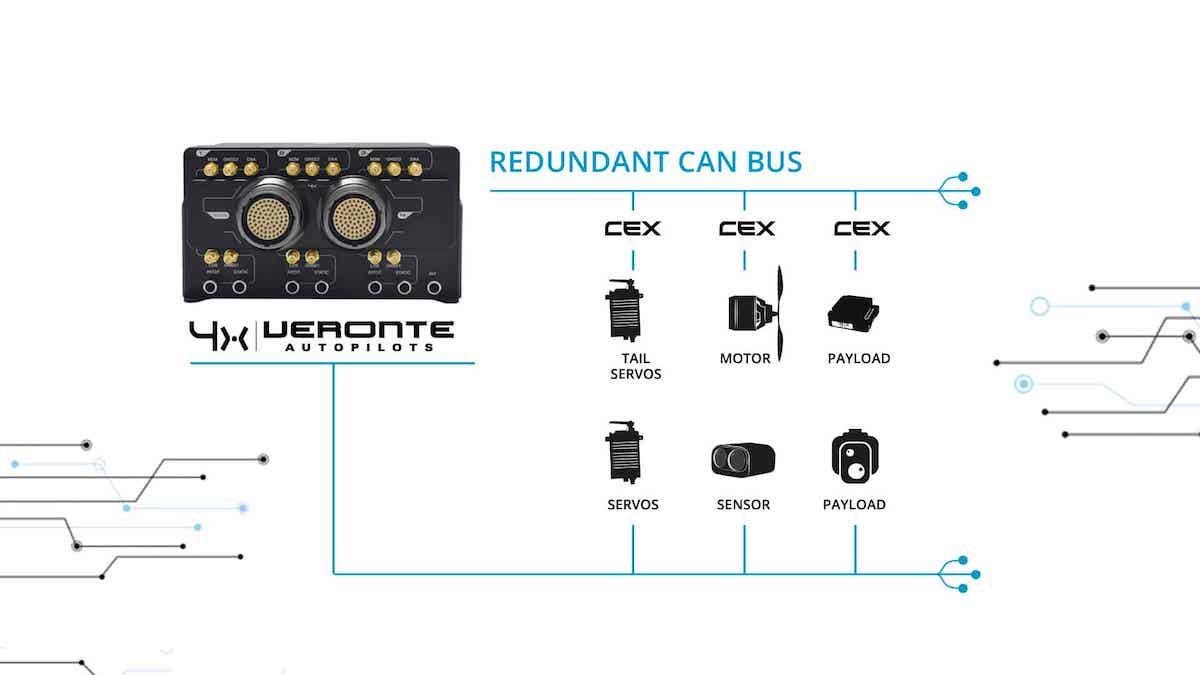
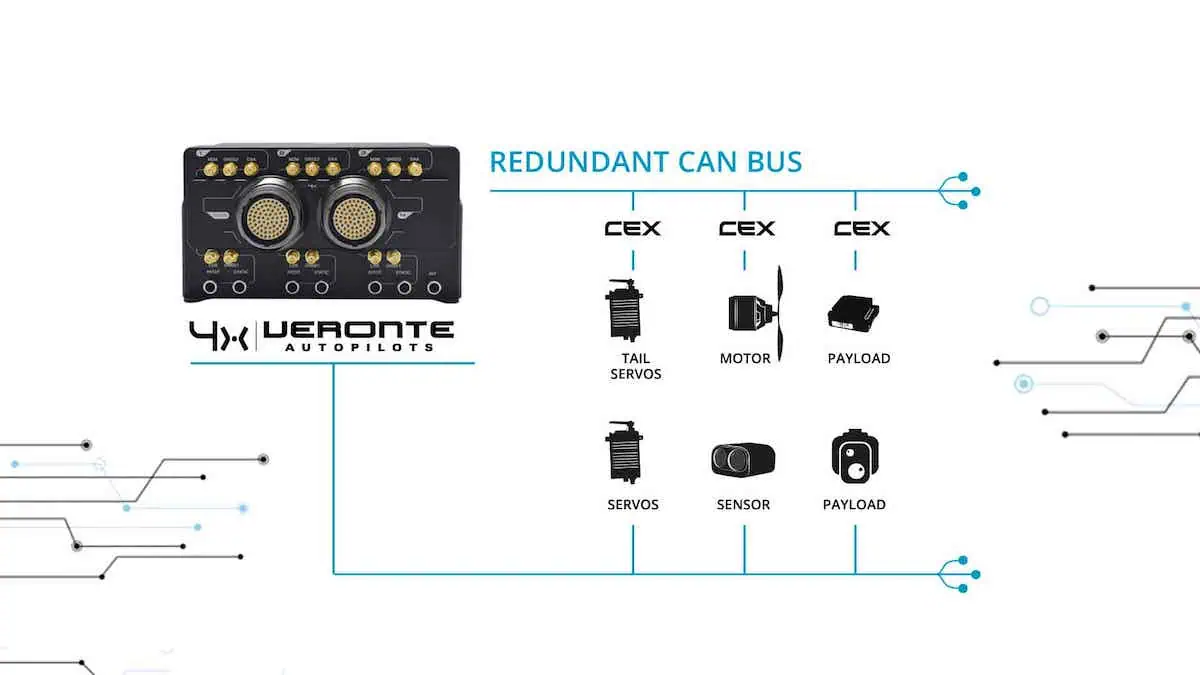
Redundancy in the system is designed to complement overall vehicle redundancy. To avoid critical failure points, redundant actuators and other critical components should be employed. These devices can connect through multiple ports on the autopilot, with internal management of communication redundancy.
The overall redundant system design should consider autopilot outputs and power banks to minimize single points of failure. For communication buses like RS232 or RS485, the output (Tx) is managed by the core selected by the referee, while input data (Rx) is received by all cores via individual buffers, reducing single points of failure.
Signals such as PWM and GPIO are managed by independent multiplexer banks, and in the event of a multiplexer failure, secondary I/O options are used.
Integrated FTS
The Veronte Autopilot 4x also features a completely hardware-independent referee voting system that can function as a Flight Termination System (FTS) in the event of a catastrophic failure involving all three autopilot cores.
These features make the Veronte Autopilot 4x one of the most robust redundant control systems in its category. Its compact and lightweight design makes it ideal for controlling autonomous vehicles, and is ideal for manufacturers of drones and eVTOLs.
Posted byWilliam MackenzieWill is a Content Specialist at Unmanned Systems Technology. Joining in 2024 with a background in professional copywriting and content marketing, Will covers the latest advancements in robotics, sensors, and unmanned systems across land, air, and maritime domains. His writing brings a clear, informed perspective to emerging technologies and their applications in both commercial and defense markets.Connect
Embention has secured Spanish Aviation Safety and Security Agency approval to integrate Part-IS information security requirements into its Production Organisation Approval, strengthening aviation cybersecurity and flight safety compliance
Embention showcased its Veronte autopilot ecosystem and demonstrated a fully functional Iron Bird system for real-time flight simulation at XPONENTIAL Europe 2026, highlighting avionics technologies for UAV and eVTOL platforms
Embention has integrated Veronte Autopilot 1x with Gotonomi SATCOM terminals, enabling plug-and-play BVLOS UAV operations, global command and control via satellite, reduced hardware complexity, and flexible, airworthiness-focused connectivity
Embention has been named in the Deloitte Technology Fast 50 Spain ranking, highlighting its sustained revenue growth and leadership in safety-critical avionics and autopilots for UAVs and eVTOLs
Feb 20, 2026
Advancing Unmanned Systems Through Strategic Collaboration
UST works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive unmanned systems capabilities forward.