ANELLO Photonics is advancing resilient maritime navigation capabilities with the ANELLO Maritime INS, a navigation solution designed to maintain accurate positioning and heading data during GPS jamming, spoofing, and signal loss. Read more >>
Built around the company’s proprietary SiPhOG™ (Silicon Photonics Optical Gyroscope) technology, the system is designed for defense, commercial, and research maritime operations, including autonomous and crewed vessels operating in contested or GPS-denied environments.
As autonomous maritime platforms operate farther from reliable GNSS coverage, inertial navigation performance becomes increasingly critical for maintaining vessel position and heading. Jamming, spoofing, and multipath interference are creating growing operational challenges near ports, coastlines, and electronic warfare environments, requiring navigation systems capable of sustaining accurate performance during extended GNSS outages.
The ANELLO Maritime INS combines low-drift inertial sensing, tightly coupled sensor fusion, and environmental modeling to reduce navigation error accumulation during GPS-denied operation. The system has been evaluated in multiple real-world maritime deployments involving degraded and denied GNSS conditions, demonstrating stable navigation performance across defense, commercial, and research applications.
Addressing the Challenges of GPS-Denied Maritime Navigation
Modern maritime operations rely heavily on GNSS signals for navigation, positioning, and vessel control. However, GPS disruption caused by jamming, spoofing, and multipath interference presents growing operational challenges for both crewed and autonomous platforms.
Maritime systems may encounter GNSS-denied conditions caused by jamming or spoofing that persist from minutes to hours while operating in dynamic sea states affected by strong currents, heavy winds, shock, and vibration. These environmental conditions can significantly affect navigation performance, particularly for autonomous vessels conducting extended-duration operations.
Conventional navigation technologies present several limitations in these scenarios. MEMS-based inertial measurement units are susceptible to thermal gradients, vibration, and dynamic motion, often resulting in substantial heading and positional drift over time. Traditional fiber optic gyroscopes (FOGs) and ring laser gyroscopes (RLGs) provide lower drift performance but are typically constrained by larger size, weight, power, and cost requirements.
Without sufficient inertial performance, accumulated gyro bias and velocity integration errors can rapidly increase positional drift, limiting the feasibility of long-duration autonomous operation.
SiPhOG™ Optical Gyroscope Technology
The ANELLO Maritime INS is centered around the company’s SiPhOG™ optical gyroscope technology, enabling low-drift inertial sensing within a compact architecture optimized for maritime deployment.
The inertial core delivers gyro bias instability below 0.5°/hr and angular random walk performance below 0.05 °/rt(hr). The system also incorporates a triple-redundant IMU configuration to improve fault tolerance while reducing measurement noise through sensor averaging.
The Maritime INS performs real-time bias estimation and compensation, allowing navigation performance to remain stable during GNSS outages and under dynamic vessel motion.
Multi-Sensor Fusion Architecture
The Maritime INS incorporates a tightly coupled sensor fusion framework based on an Extended Kalman Filter (EKF), continuously estimating vessel position, velocity, and orientation.
To constrain drift accumulation during GPS-denied operation, the system integrates multiple aiding inputs. Velocity aiding can be provided through a Doppler Velocity Log (DVL), which measures velocity over ground, as well as paddle wheel and ultrasonic sensors that provide speed-through-water measurements.
Internal GNSS data can be incorporated when signals are available, while optional external aiding sources include M-Code GNSS, vision-based navigation, and celestial navigation.
The system also incorporates environmental modeling capabilities designed to improve long-duration navigation accuracy. Machine learning augmentation estimates ocean current vectors, enabling the system to distinguish between actual vessel motion and environmental effects influencing speed sensor measurements. This improves system observability and reduces long-term position error accumulation.
Demonstrated Performance in Contested Environments
Field testing of the ANELLO Maritime INS has demonstrated stable inertial navigation during GNSS outages, spoofing events, and degraded signal conditions.
Operational deployments showed that velocity aiding inputs such as DVL and speed-through-water sensors can effectively constrain velocity error while supporting continuous IMU bias estimation and correction. The system is also designed to maintain robust navigation performance during sensor dropouts.
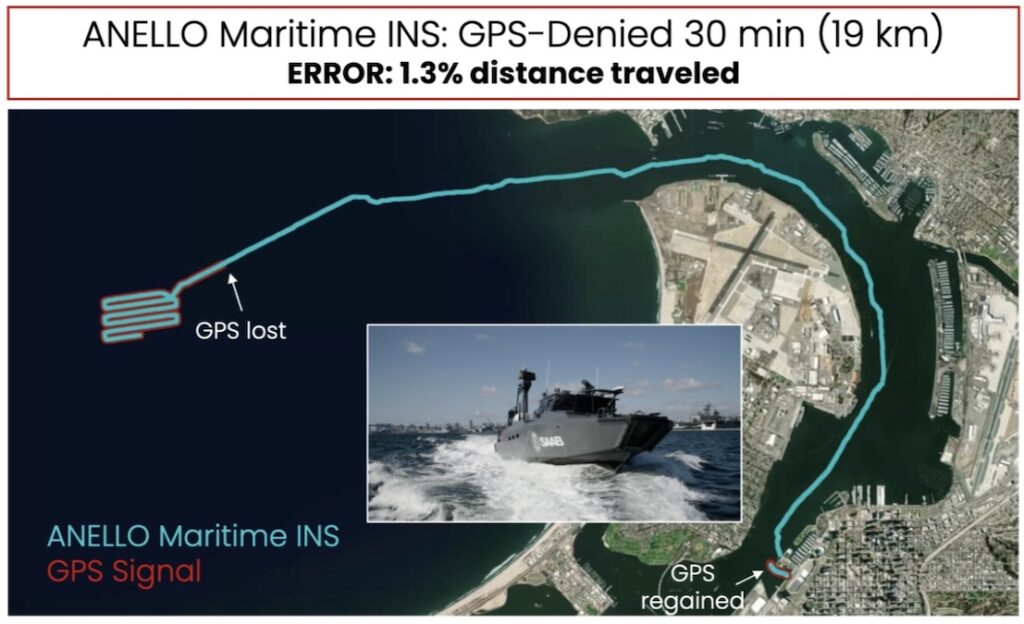
During a 30-minute GPS-denied unmanned surface vessel deployment, the system achieved total drift of 1.3% over the operational distance, supporting extended autonomous operation with reduced drift accumulation.

Figure 2: ANELLO Maritime INS navigating through GPS spoofing and signal degradation.
Additional testing conducted in the Gulf of Aqaba, Jordan, evaluated system performance during active GPS spoofing and signal degradation. The Maritime INS demonstrated resilient navigation performance throughout the deployment, enabling continued unmanned surface vessel operations despite contested GNSS conditions.
Bridging the Gap Between MEMS and Traditional Optical INS
The ANELLO Maritime INS is designed to bridge the performance gap between compact MEMS-based systems and larger traditional optical inertial navigation systems.
Low gyro bias reduces heading-induced positional drift, while heterogeneous sensor fusion improves resilience during GNSS loss and individual sensor degradation. At the same time, the SiPhOG™ architecture enables reduced SWaP requirements compared to conventional optical INS technologies.
This combination supports scalable deployment across a broad range of maritime platforms, including autonomous surface vessels, defense systems, and commercial fleets operating in GPS-contested environments.
Supporting Long-Duration Maritime Operations
As maritime operations increasingly encounter degraded or denied GNSS conditions, resilient inertial navigation systems are becoming essential for maintaining operational continuity.
By combining low-drift silicon photonics inertial sensing, advanced state estimation, multi-sensor velocity aiding, and environmental compensation, the ANELLO Maritime INS provides a dead-reckoning architecture designed for long-duration maritime missions in GPS-denied environments.
The system provides position and heading data during jamming, spoofing, and complete GNSS outages, supporting mission continuity for maritime platforms operating in contested and degraded conditions.