




GNSS Receivers for Autonomous and Unmanned Platforms
Discover cutting-edge solutions from 9 leading global suppliers
ArduSimple provides user-friendly and cost-effective RTK GNSS solutions for drones and robotics.
This guide outlines the steps for using the simpleRTK2B Heading kit with external RTK corrections sent through Mission Planner or QGroundControl.
Required Hardware
- simpleRTK2B Heading – Basic Starter Kit
- USB to micro-USB cable
- Pixhawk cable set
- Holybro Pixhawk4 (or another compatible autopilot)
- PC or laptop
Required Software
- Mission Planner
- u-center (compatible with M8, M9, and F9)
Preliminary Considerations
This guide is based on the simpleRTK2B Heading – Basic Starter Kit. Different hardware may require adjustments. Refer to the tutorial for the simpleRTK3B Heading if applicable.
Validation has been completed with the Holybro Pixhawk4 and ArduCopter 4.1.5 firmware.
ArduPilot has specific requirements for GNSS-based heading:
- Ensure a strong RTK fix by positioning antennas outdoors in an open space, avoiding obstructions like trees or tall buildings. Indoor setups near windows are not suitable.
- Maintain a distance of 30 cm to 5 m between antennas. Placing them too close or far apart will result in failure.
- Align antennas along the rover’s X-axis (forward direction); adjustments can be made later.
- Position antennas at the same height relative to the autopilot plane. If not, adjust the GPS_POS1_Z parameter accordingly.
- Avoid connecting the GNSS receivers to the autopilot initially. Configuration should be completed separately before final connection.
Included in the simpleRTK2B + Heading Basic Starter Kit:
- The simpleRTK2B (big board) functions as the base in the moving base configuration.
- The simpleRTK2B Lite (small board) serves as the rover.
- Configuration files are compatible with ZED-F9P firmware version 1.13.
Step 1: Configure the simpleRTK2B Receiver (Big Board)
1. Connect the simpleRTK2B to a PC using the USB port labeled POWER+GPS.

2. Open u-center and establish a connection through the COM port.
3. Navigate to Tools > Receiver Configuration, and select the file simpleRTK2B_FW113_HeadingKit_extcorrections_simpleRTK2B_5Hz-00.txt. Click Transfer file > GNSS.

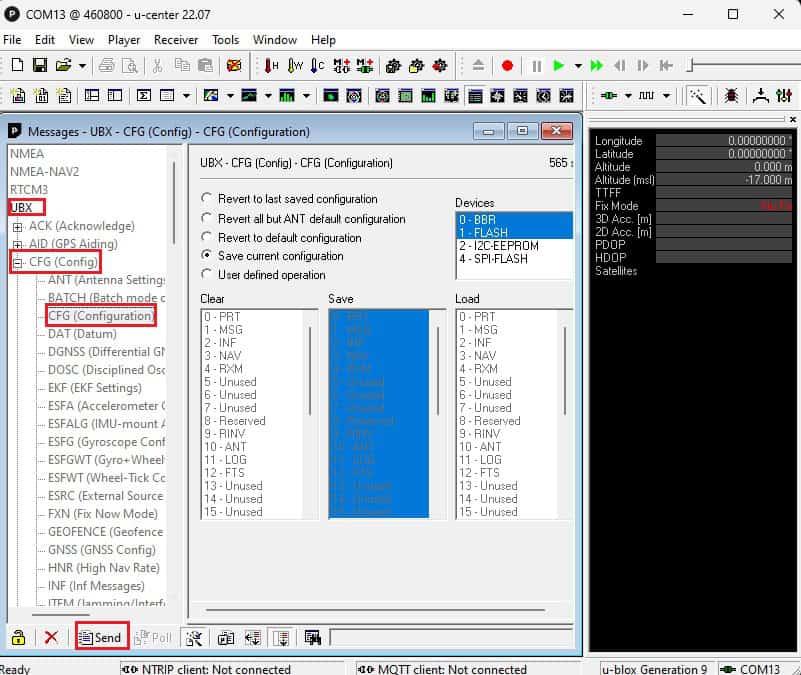
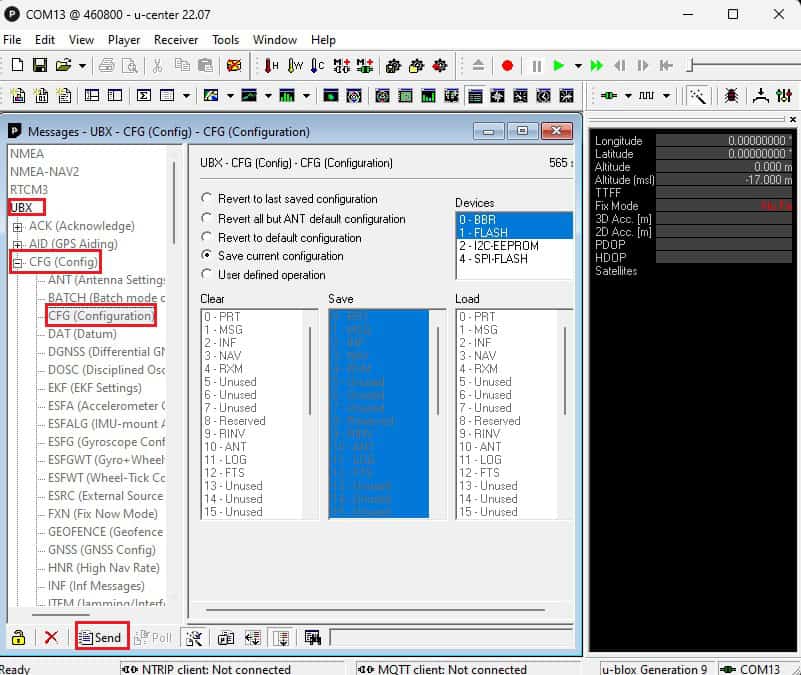
4. Access View > Messages View > UBX > CFG > CFG, select Save current configuration, and click Send.

Step 2: Configure the simpleRTK2B Lite Receiver (Small Board)
5. Ensure the simpleRTK2B Lite board is mounted on the simpleRTK2B board.

6. Connect the board to the PC via the USB labeled POWER+XBEE. This port accesses the simpleRTK2B Lite via UART1.

7. Open u-center and connect through the COM port.
8. Go to Tools > Receiver Configuration and load the file simpleRTK2B_FW113_HeadingKit_extcorrections_simpleRTK2Blite_5Hz-00.txt. Click Transfer file > GNSS. Note: The configuration file may need to be uploaded twice due to a mid-configuration baud rate change.
9. Access View > Messages View > UBX > CFG > CFG, select Save current configuration, and click Send.

Step 3: Load the ArduPilot Configuration File
10. Connect the Pixhawk to the PC using a USB to micro-USB cable.
11. Open Mission Planner and connect to the Pixhawk via the COM port.

12. Navigate to CONFIG > Full Parameter List, then modify these parameters:
- COMPASS_ENABLE,0
- COMPASS_USE,0
- COMPASS_USE2,0
- COMPASS_USE3,0
- EK3_MAG_CAL,5
- EK3_SRC1_YAW,2
- GPS_AUTO_CONFIG,0
- GPS_AUTO_SWITCH,0
- GPS_POS1_X,-1.25 (Value reflects the distance between antennas in meters. Adjust for a 180° offset or swap SMA connectors in simpleRTK2B+heading.)
- GPS_PRIMARY,1
- GPS_RATE_MS,200
- GPS_RATE_MS2,200
- GPS_TYPE,17
- GPS_TYPE2,18
- SERIAL1_BAUD,460
- SERIAL1_OPTIONS,0
- SERIAL1_PROTOCOL,5
- SERIAL2_BAUD,460
- SERIAL2_OPTIONS,0
- SERIAL2_PROTOCOL,5
Click Write Params to save the settings.

13. Disconnect the USB cable to power down the autopilot and apply the changes.
Step 4: Connect the Heading Kit to the Autopilot
14. Complete the initial autopilot setup by following the ArduPilot user guide.
15. Use the JST connector to link the simpleRTK2B (big board) to the TELEM1 port and the simpleRTK2B Lite (small board) to the TELEM2 port. Connect the big board to the PC via the USB port labeled POWER+GPS.
16. Attach the antennas to the receivers, ensuring they are outdoors and meet the mentioned requirements.

17. Power the autopilot and wait a few seconds. Verify the AHRS heading value in Mission Planner—it should correspond to the direction between the antennas.

18. Check the antennas’ heading using u-center under View > Messages View > UBX > NAV > RELPOSNED.
For additional validation, confirm the AHRS heading matches the value under CTRL+F > MAVlink inspector > GPS2_RAW > yaw.

19. You are now able to send RTK corrections from your ground control station to your autopilot.
Troubleshooting GNSS-Based Yaw
The GNSS-based yaw may not work if:
- The fix type is not RTK fix.
- The antenna distance is outside 20% of the GPS1_POS_X parameter.
- The autopilot’s attitude does not align with antenna height differences.
Read the original article >>







