In this guide, ArduSimple outlines how to integrate high-precision GNSS heading into the ArduPilot setup using the simpleRTK3B Heading receiver, powered by Septentrio Mosaic-H.
Required Hardware
- simpleRTK3B Heading
- 2 × Lightweight Helical GNSS Tripleband + L-band Antennas (IP67)
- 2 × SMA Antenna RF Cable Extenders (necessary for helical antennas)
- USB to USB-C Cable
- USB to Micro-USB Cable
- Pixhawk Cable Set
- Holybro Pixhawk4 (or another preferred autopilot)
- A PC or Laptop
Required Software
- Mission Planner
Pre-Setup Notes
This guide is tailored for the simpleRTK3B Heading. If you use different hardware, some adjustments may be needed. An additional guide is available for the simpleRTK2B Heading kit.
This tutorial has been verified with:
- Holybro Pixhawk4
- mRo Pixhawk Flight Controller (Pixhawk 1)
And the following firmware versions:
- ArduRover 4.1.0-dev
- ArduCopter 4.1.0-dev
- ArduPlane 4.1.0-dev
Connecting the simpleRTK3B Heading RTK Receiver to ArduPilot
1. Configure the simpleRTK3B Heading Receiver
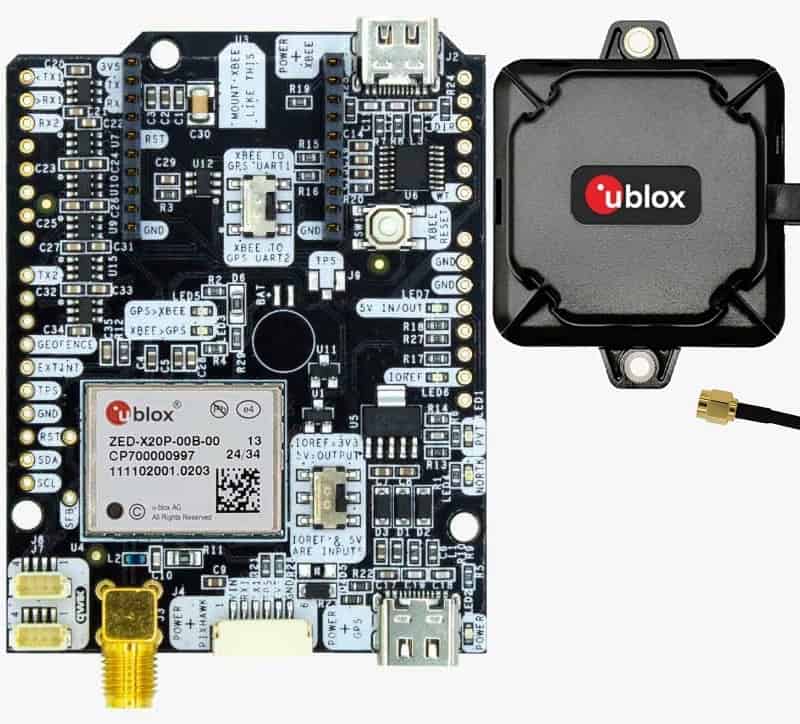
Connect the simpleRTK3B Heading to your PC using the USB-C cable via the PORT labeled POWER+GPS.

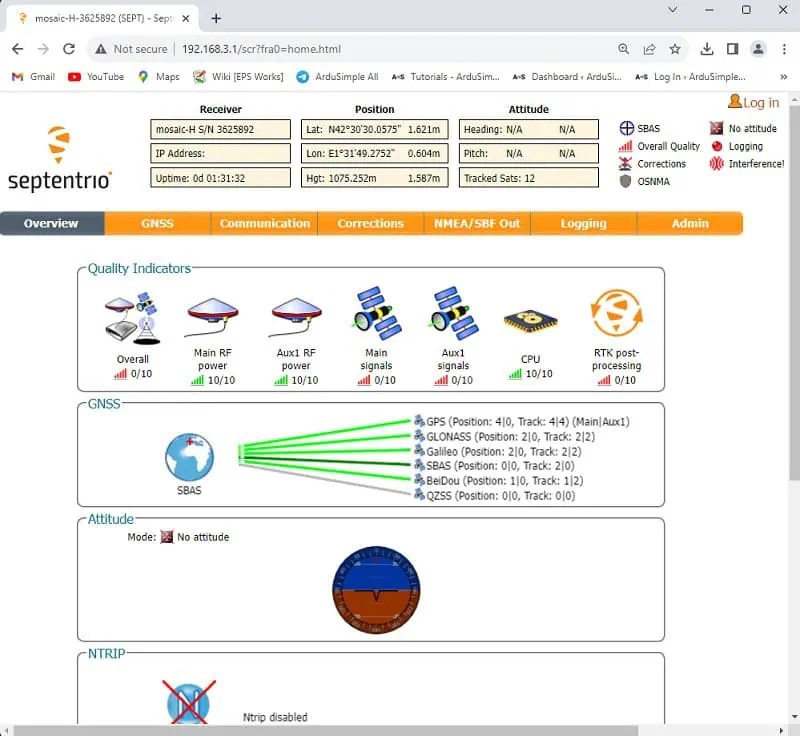
Open a browser and enter 192.168.3.1 to access the Septentrio web interface.
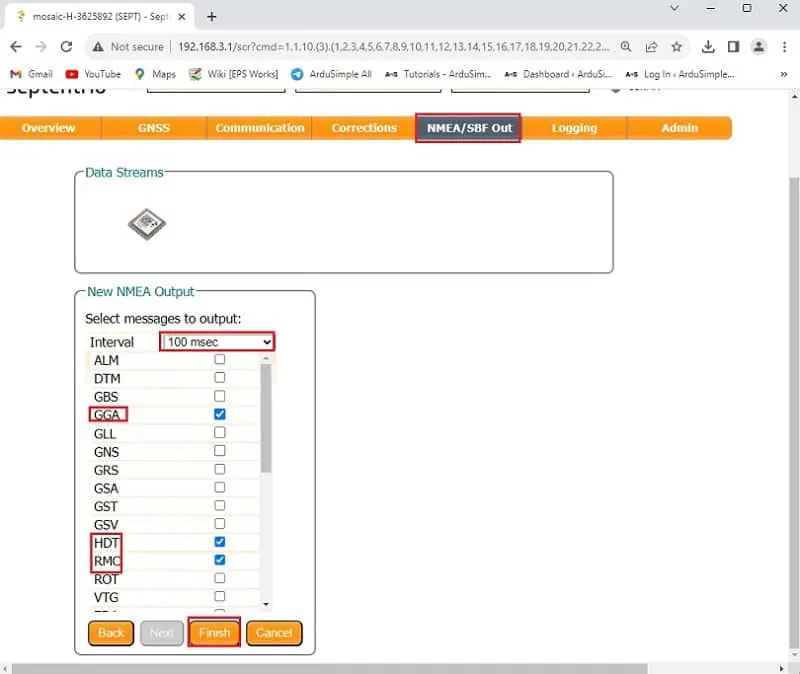
Navigate to NMEA/SBC Out → New NMEA Stream → Serial Port (Next) → COM3 (Next) → Interval (100ms). Select GGA, RMC, HDT, then click Finish.
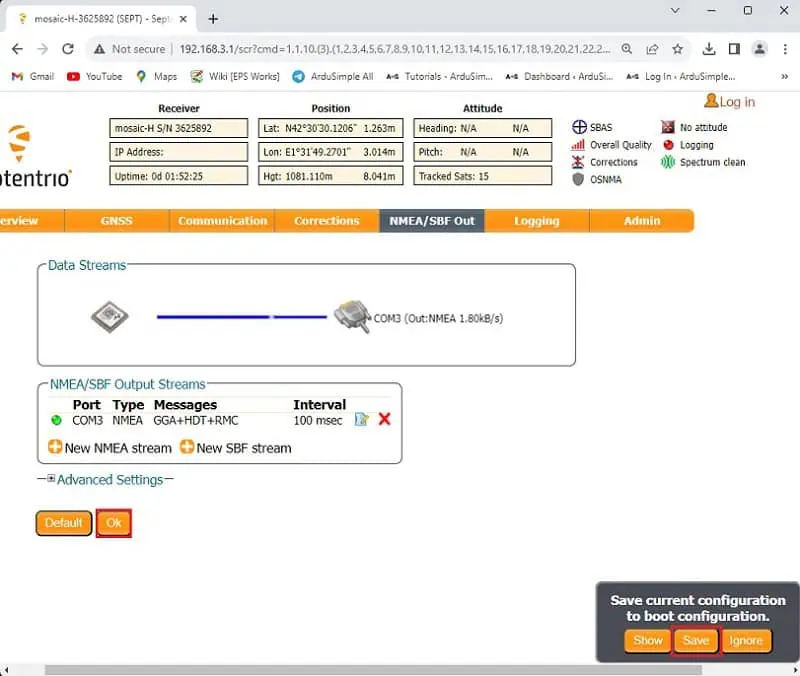
Click Ok, and a pop-up will appear in the lower right corner. Click Save Configuration.
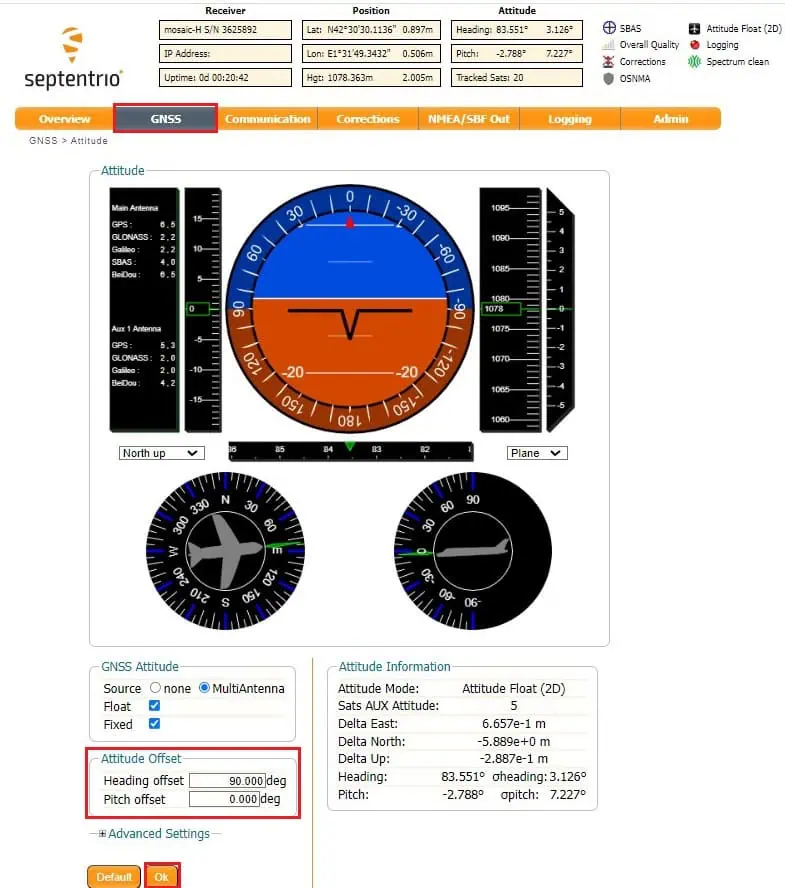
Attach both GNSS antennas to the receiver, ensuring they have an unobstructed view of the sky. Go to GNSS → Attitude. Set the Attitude Offset → Heading Offset value to match your antenna configuration relative to your platform.
Adjust until the reported heading aligns with your vehicle’s heading (typically 0, 90, 180, or 270 degrees, unless using an unusual antenna setup). Click Ok and Save in the lower right corner.
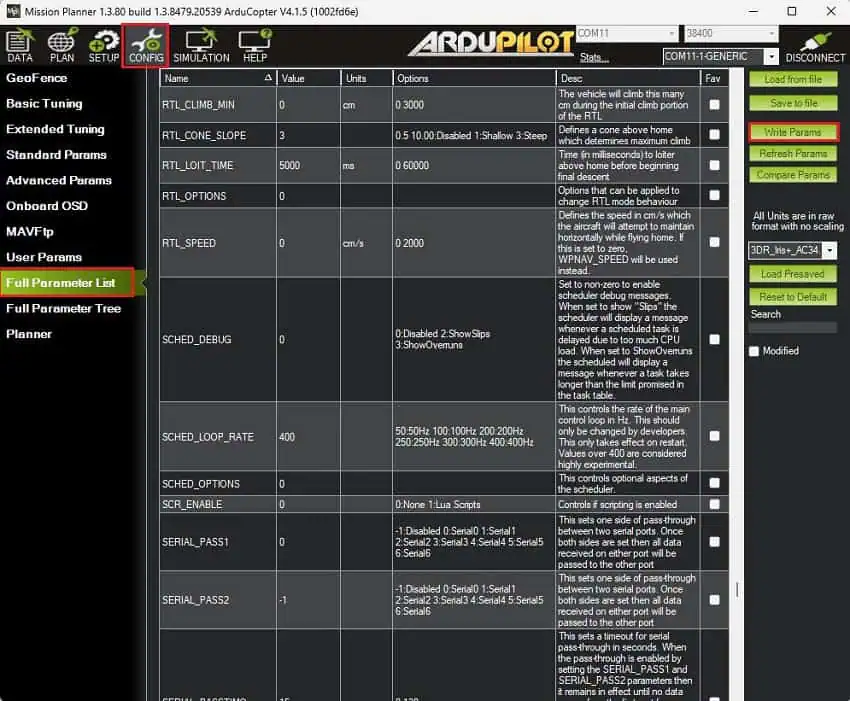
2. Configure ArduPilot
Connect your Pixhawk to your computer using a USB to Micro-USB cable. Open Mission Planner and connect to your Pixhawk via COM port.

Go to CONFIG → Full Parameter List. Depending on your firmware version, update the following parameters from their defaults:
-
-
- COMPASS_ENABLE: 0
- COMPASS_USE: 0
- COMPASS_USE2: 0
- COMPASS_USE3: 0
- EK3_MAG_CAL: 5
- EK3_SRC1_YAW: 2
- GPS_AUTO_CONFIG: 0
- GPS_AUTO_SWITCH: 0
- GPS_RATE_MS: 100
- GPS_TYPE: 16
- SERIAL1_BAUD: 115
- SERIAL1_PROTOCOL: 5
-
Press Write Params to save your settings. Disconnect the USB cable to power cycle your autopilot.
3. Connect the Heading Kit to Your Autopilot
Use the JST connector on the simpleRTK3B Heading and attach it to the TELEM1 port.

Power up the autopilot, wait a few seconds, and check the AHRS heading value in Mission Planner to ensure it aligns with the direction between your antennas.

For additional verification, the AHRS heading value should match the one shown in CTRL+F → MAVLink inspector → GPS_RAW_INT → yaw.

Note that the EKF will use gyroscope readings, so if the autopilot moves without adjusting the vehicle frame with the antennas, the heading may temporarily shift but will stabilize to the GNSS-calculated heading after a few seconds.
For base station or NTRIP corrections to enhance precision, refer to ArduSimple tutorials:
- Sending RTK Base Station Corrections to ArduPilot with Mission Planner, QGroundControl, and MAVProxy
- Sending NTRIP Corrections to ArduPilot with Mission Planner, QGroundControl, and MAVProxy
All necessary products are available for purchase and immediate shipping:
- simpleRTK3B Heading
- 2 × Lightweight Helical GNSS Tripleband + L-band Antennas (IP67)
- 2 × SMA Antenna RF Cable Extenders
- USB to USB-C Cable
- USB to Micro-USB Cable
- Pixhawk Cable Set