Holybro is a leading research and development specialist and developer of autopilots and other essential electronic systems for UAVs (unmanned aerial vehicles).
Holybro is a continued supplier partner on UST, where we have been highlighting their unique solutions and capabilities through their UST supplier profile, which has been written and built by our team in collaboration with the company.
The Platinum profile showcases their product portfolio, which is trusted by a diverse range of users from hobbyists and commercial drone manufacturers to public and private aerospace research institutes and defense organizations worldwide.
Read on to find out more:
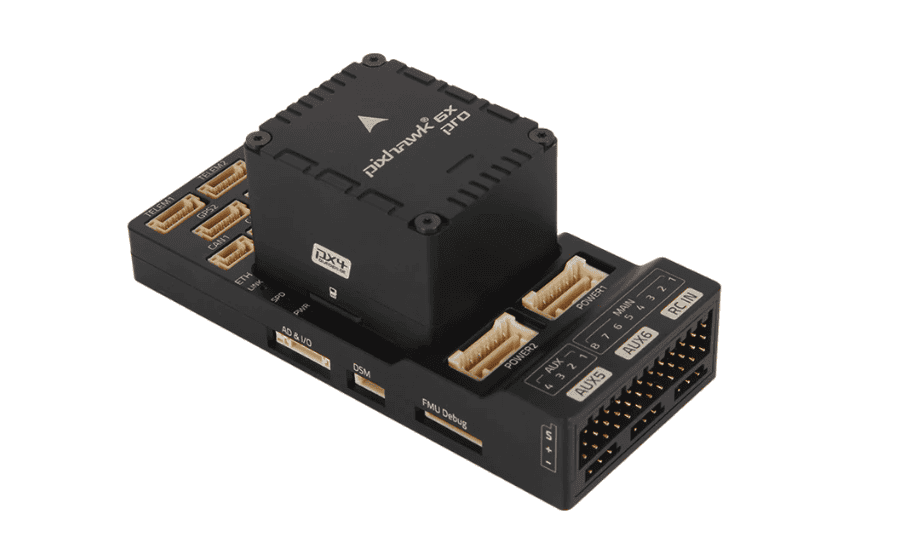
 The Pixhawk 6X flight controller features triple-redundant IMU sensors and utilizes a design incorporating completely isolated sensor domains with separate buses and separate power control. A high-speed Ethernet interface allows the unit to be easily integrated into a wide range of drone mission computers.
The Pixhawk 6X flight controller features triple-redundant IMU sensors and utilizes a design incorporating completely isolated sensor domains with separate buses and separate power control. A high-speed Ethernet interface allows the unit to be easily integrated into a wide range of drone mission computers.
The Pixhawk 6X Pro provides triple-redundant IMUs including a main sensor with a high accelerometer dynamic range of ±40 g, as well as dual-redundant barometers. The safety-driven modular design utilizes completely isolated sensor domains with separate buses and separate power control.
 Based on the NVIDIA Jetson Orin NX/Nano carrier board, the Pixhawk Jetson Baseboard can be used with any PAB (Pixhawk Autopilot Bus) form factor flight controller, including the Pixhawk 6X. The baseboard provides a rich set of I/O capabilities, including Gigabit Ethernet, USB, UART, HDMI, and MIPI CSI camera inputs.
Based on the NVIDIA Jetson Orin NX/Nano carrier board, the Pixhawk Jetson Baseboard can be used with any PAB (Pixhawk Autopilot Bus) form factor flight controller, including the Pixhawk 6X. The baseboard provides a rich set of I/O capabilities, including Gigabit Ethernet, USB, UART, HDMI, and MIPI CSI camera inputs.
The Pixhawk RPi CM4 Baseboard allows you to combine any PAB (Pixhawk Autopilot Bus) form factor flight controller with a Raspberry Pi CM4 companion computer. A wide variety of I/O connections are provided for ease of use for developers and systems integrators.
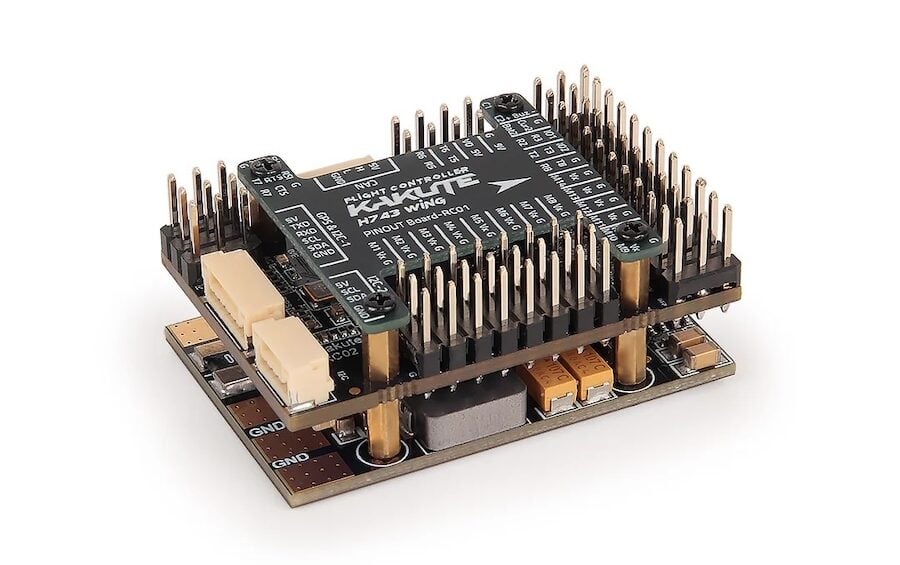
 The Kakute H743 Wing is a full-featured flight controller specifically designed for fixed-wing and VTOL drones. Featuring an Arm Cortex-M7 CPU supporting ArduPilot-based firmware and a high-precision low-noise IMU, it provides a range of I/O including UART, PWM and I2C as well as plug-and-play compatibility with CAN devices and GPS receivers.
The Kakute H743 Wing is a full-featured flight controller specifically designed for fixed-wing and VTOL drones. Featuring an Arm Cortex-M7 CPU supporting ArduPilot-based firmware and a high-precision low-noise IMU, it provides a range of I/O including UART, PWM and I2C as well as plug-and-play compatibility with CAN devices and GPS receivers.
 The H-RTK mosaic-H is a state-of-the-art GPS & GNSS module based around an advanced Septentrio receiver with integrated magnetometer and dual-antenna inputs. By utilizing GPS as the yaw source instead of a traditional compass, it provides drone autopilots with more accurate information, thus enhancing navigation performance.
The H-RTK mosaic-H is a state-of-the-art GPS & GNSS module based around an advanced Septentrio receiver with integrated magnetometer and dual-antenna inputs. By utilizing GPS as the yaw source instead of a traditional compass, it provides drone autopilots with more accurate information, thus enhancing navigation performance.
H-RTK F9P differential high-precision GNSS modules are based around the u-blox ZED-F9P and offer fast convergence times, reliable performance and fast update rates. The series features three models – a low-cost variant for rover applications, a helical antenna version for rovers or base stations, and a model with a high-gain antenna specifically designed for base stations.
 The DroneCAN version of the H-RTK F9P differential high-precision GNSS module for rover applications offers enhanced resistance to EMI and an update rate of up to 8 Hz. This model features a low profile with superior ingress protection for rugged and space-constrained drone applications. A helical antenna version is also available that provides enhanced performance in obstruction-filled environments and is ideal for rover or base station applications.
The DroneCAN version of the H-RTK F9P differential high-precision GNSS module for rover applications offers enhanced resistance to EMI and an update rate of up to 8 Hz. This model features a low profile with superior ingress protection for rugged and space-constrained drone applications. A helical antenna version is also available that provides enhanced performance in obstruction-filled environments and is ideal for rover or base station applications.
To find out more about Holybro and their autopilots, navigation systems and other hardware peripherals for UAVs, please visit their profile page:
https://www.unmannedsystemstechnology.com/company/holybro/