Voyis’ Recon LS payload has been integrated into AUVs recently purchased by the Danish Ministry of Defence Acquisition and Logistics Organisation (DALO). The LAUVs (Light Autonomous Underwater Vehicles), manufactured by OceanScan Marine Systems & Technology, will be used by the Danish Navy for mine countermeasures (MCM) operations.
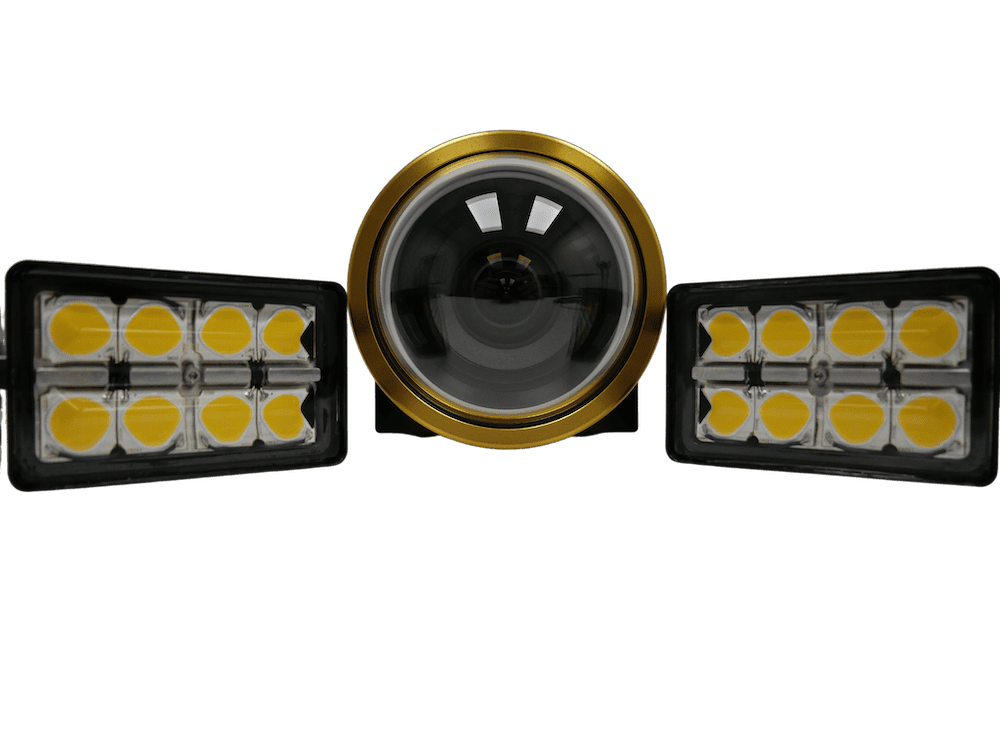
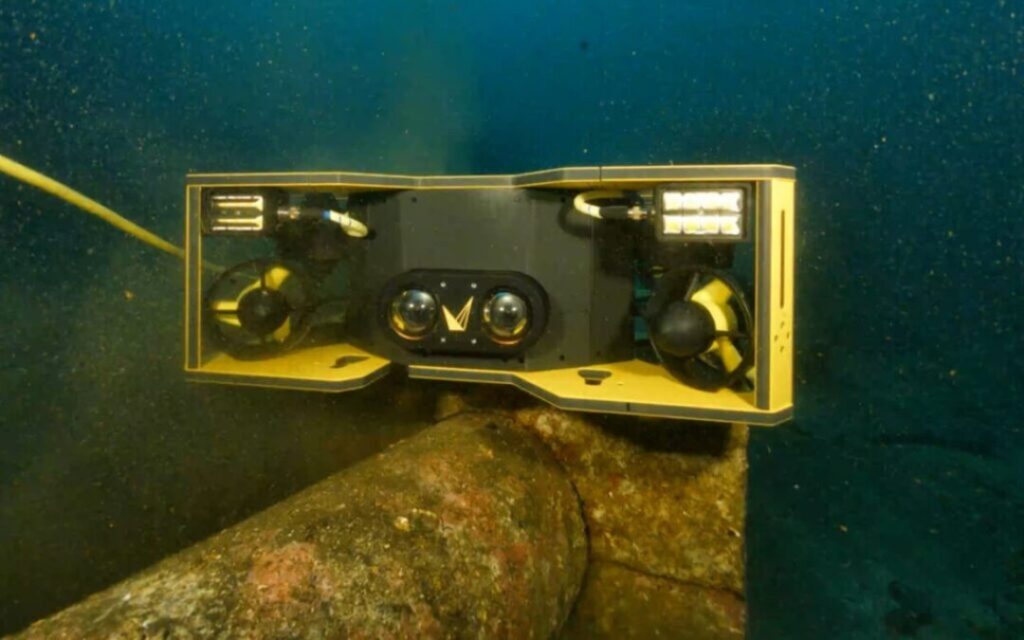
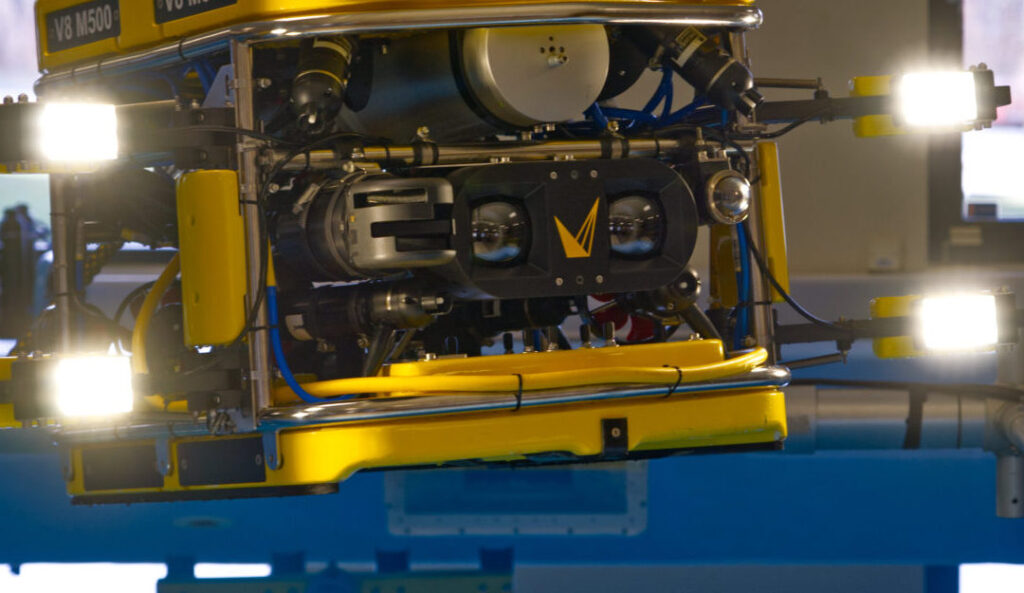
The LAUV is a rugged lightweight AUV designed to be simple to deploy and recover, and operated by a single person. The Voyis Recon LS System enables uncrewed underwater vehicles to perform covert identification of MLOs (mine-like objects) with reduced demand on divers, using 4K digital stills cameras and quantifiable 3D laser models.
MCM operations consist of 4 stages: Detection, Classification, Identification (ID), and Disposal/Neutralization. Currently, mine detection, and sometimes classification, is completed using side-scan sonar, but a vessel must then enter the minefield to deploy a clearance diver or ROV (Remotely Operated Vehicle) to complete the visual identification stage. It is extremely time-consuming to identify all MLOs in areas with complex seabed layouts, due to a high probability of false positives from sonar detection, which results in many unnecessary diver deployments with personnel and vessels in a high-risk environment.
Voyis’ Recon LS is ideally suited for remote mine identification, enabling autonomous reacquire missions to be executed with the same vehicle assets used for detection. Complete visual identification data, comprised of quantitative 3D laser and qualitative stills image data, can be efficiently collected for all MLOs in a single survey mission. In addition to providing high confidence in identification of targets, the datasets collected from the Recon LS are georeferenced, improving the localization of potential threats and optimizing the operational tempo for MCM missions where divers or ROVs are required to neutralize high-probability targets.
A representative from the OceanScan team commented: “The capability to have the LAUV gathering side-scan sonar data combined with cameras looking at the nadir is something very interesting. Voyis was selected because their module can collect video images in a very darkened environment and at the same time build a 3d point cloud based on those images.”