Voyis has released the following article, written by CEO Chris Gilson, explaining how improved vision-based navigation technologies will elevate the performance of AUVs (autonomous underwater vehicles). The article originally appeared in Ocean News & Technology magazine.
The ocean sector has a clear emerging vision for underwater exploration – uncrewed surface vessels deploying autonomous subsea platforms, all controlled from ashore. The potential to disrupt the industry by drastically reducing the cost of deployment and access to remote regions is catalysing groups in all segments to pursue this dream, from survey companies to research institutes and global navies. Though the building blocks are starting to fall into place, with new commercial technologies enabling effective remote operations, and improved autonomous underwater vehicle (AUV) capabilities enabling remote deployment and recovery, there remains some core technical challenges that must be overcome to achieve this vision. One critical element is reliable and consistent subsea navigation.
Vision-Based Navigation
Subsea vehicles, particularly AUVs, have successfully relied on high accuracy dead-reckoned inertial navigation systems (INS) coupled with doppler velocity logs (DVLs) for their positioning during underwater surveys. Unfortunately, navigation using an INS-DVL without external aiding is a methodology that inherently drifts over time, meaning error continuously increases during a mission. Drift can be minimized by using surface-based USBL positioning, or localized LBL positioning, but these solutions have limitations in deep water, and across wide areas, respectively. A truly autonomous framework will require complementary methods to deliver robust and long duration subsea positioning.
If we look to terrestrial applications for inspiration, driverless cars and aerial drones as an example, we see their solutions to comparable problems all leverage imaging sensors and computer vision to deliver accurate navigational solutions. By detecting environmental features, the platform’s relative position can be tracked while simultaneously mapping the environment as it is perceived – technically referred to as simultaneous localization and mapping (SLAM). Not only does this improve reliability by aiding dead reckoning with through-the-sensor visual measurements, but it also provides a framework to reconnect with past perceptions by detecting loop closure events – an event where the autonomous vehicle recognizes a previously visited area, and is able to correct its position with this knowledge.
It is evident that these same methodologies could be applied to underwater navigation, utilizing imaging data of a subsea environment from sensors like digital stills cameras, laser scanners, or high-resolution sonar.
Laser Loop Closure
Voyis and its development partners, including the DECAR Systems Group at McGill University, have applied these terrestrial methodologies to the subsea environment by taking advantage of Voyis’ high-resolution 3D laser data from its Insight laser scanners. Subsea laser scanners are uniquely suitable for this application since they generate rich quantitative data in real-time, enabling the identification of environmental features during an active mission, and then detecting loop closure events when a location has been previously visited.
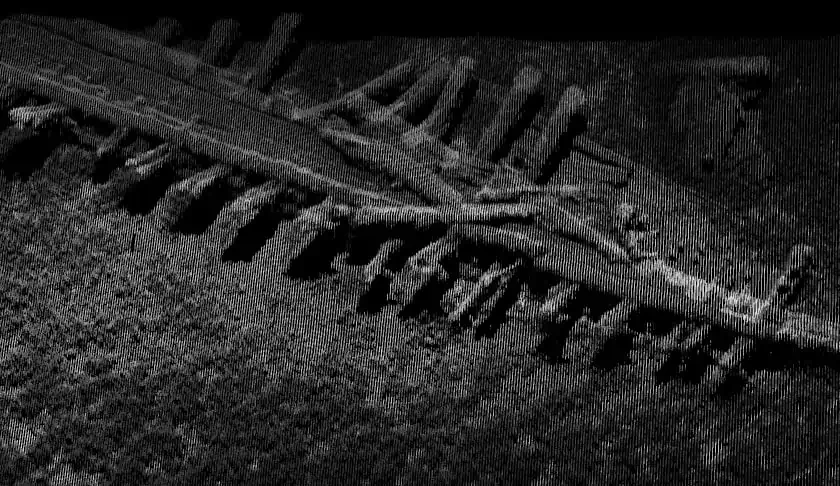
3D laser model of the shipwreck used for feature detection
Loop closure algorithms were tested on a local shipwreck survey which provides a quantifiable target to evaluate the methodology. The shipwreck was traversed on multiple survey passes to generate a sequence of loop closure events, with navigation data recorded with optional GPS aiding to provide a ground-truth trajectory. Real-time navigational data is used to identify possible loop closure regions, then the algorithms analyse the laser data to identify and match features. Once detected, these events can be input back into the navigational solution to eliminate the accumulated error. The identified loop closure events are illustrated below, matching features both on the shipwreck and in the surrounding seabed.
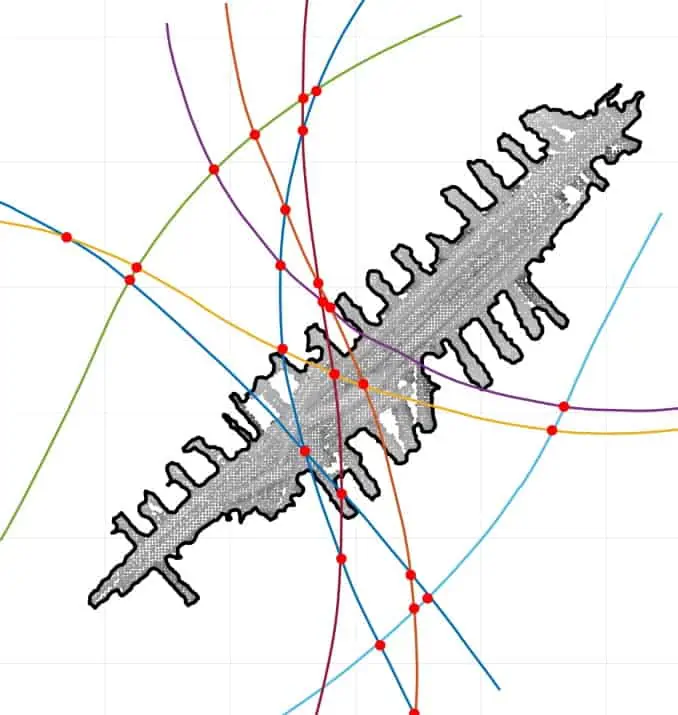
Detected loop closures
The improvement to navigational positioning is demonstrated in a trajectory error graph, where the baseline INS-DVL exhibits a continuously growing error, while the laser loop closure aided solution continually maintains an error of less than 0.1m across the entire survey.

The trajectory error graph shows where the baseline INS-DVL exhibits a continuously-growing error, while the laser loop closure-aided solution continually maintains an error of less than 0.1m
One benefit of this is improved trajectory is drastically improved laser data registration from subsequent survey passes, utilizing loop closure feature matches to align all datasets into a globally consistent model. This would similarly benefit other sensor data types like image-based photogrammetry, and multibeam sonar.

Colour-corrected image mosaic of the shipwreck
Future Applications
The potential uses for this technology spans all ocean sector survey applications. At a high-level, when mapping large areas for marine research or generating digital twins of offshore windfarms and oil & gas installations, more globally consistent 3D models can be produced with improved localization of critical features. The automated data registration capability drastically improves the repeatability of accurate measurements within the dynamic laser scanning dataset and simplifies the process of overlaying subsequent survey results, facilitating automated change detection analysis.
When using AUVs to search for specific targets, often first identified with side-scan sonar, an optical survey that needs to deliver complete coverage can achieve consistent positioning accuracy throughout the entire mission by linking together successive survey passes, ensuring targets identified at any point in the mission can be localized with high accuracy for the ensuing human intervention. This can be particularly useful for naval mine countermeasures applications, where operating covertly limits the ability to surface for GPS position updates, or when operating in in GPS restricted locations.
Looking further ahead, this capability could be incorporated more tightly into long duration navigation methodologies, utilizing prior maps or survey databases to achieve continuous landmark navigation. Features of known locations from past surveys or existing bathymetric maps can be continually referenced, so that when the vehicle enters an established area it can reinitialize its global position by identifying features in the area. Similarly, this capability could enhance vehicle autonomy in localized structure inspections where detected loops can support automated path planning to ensure complete inspection coverage is achieved.
The challenge of fully uncrewed ocean operations is inspiring innovations across the ocean economy, and at both sensor and system levels, bringing us closer to a future where we can explore and understand our oceans more efficiently and with better data than ever before. The final step is pulling it all together on a commercial scale to attain this vision, but true autonomy will not be achieved in isolation, it will require surveyors, vehicle designers, and sensor manufacturers all working in collaboration to illuminate the unknown.