Voyis has authored the following article detailing how the company’s payloads for autonomous underwater vehicles (AUVs) have improved the detection process for mine counter-measure (MCM) missions.
Sea mines remain a constant and widespread threat in international waters, creating persistent issues for military operations, commercial shipping, and subsea construction. Navies around the world are actively updating their mine countermeasure capabilities to address evolving threats with a focus on replacing crewed platforms that operate inside minefields with uncrewed autonomous solutions controlled from a standoff distance. These new platforms provide the opportunity to achieve more efficient and covert Mine Countermeasure (MCM) missions with remote mine identification. They can now be executed in a manner that significantly reduces the danger to human life by only deploying personnel into the minefield when there is a high degree of target certainty.
A typical mine countermeasures operation consists of four stages: detection, classification, identification, and neutralization. Autonomous underwater vehicles (AUVs) are in active use for the detection and classification stages of operations, utilizing side-scan sonar to efficiently survey vast areas of the seafloor to find mine-like objects (MLOs). But once detected, the current concept of operations (CONOPS) is to deploy clearance divers or remotely operated vehicles from inside the minefield, a practice that can be highly inefficient when there is low confidence in MLO detection. If we are to achieve the true potential of these autonomous platforms, AUV capability must be extended to achieve more mission scope – in particular gaining the means to execute remote mine identification with optical payloads.
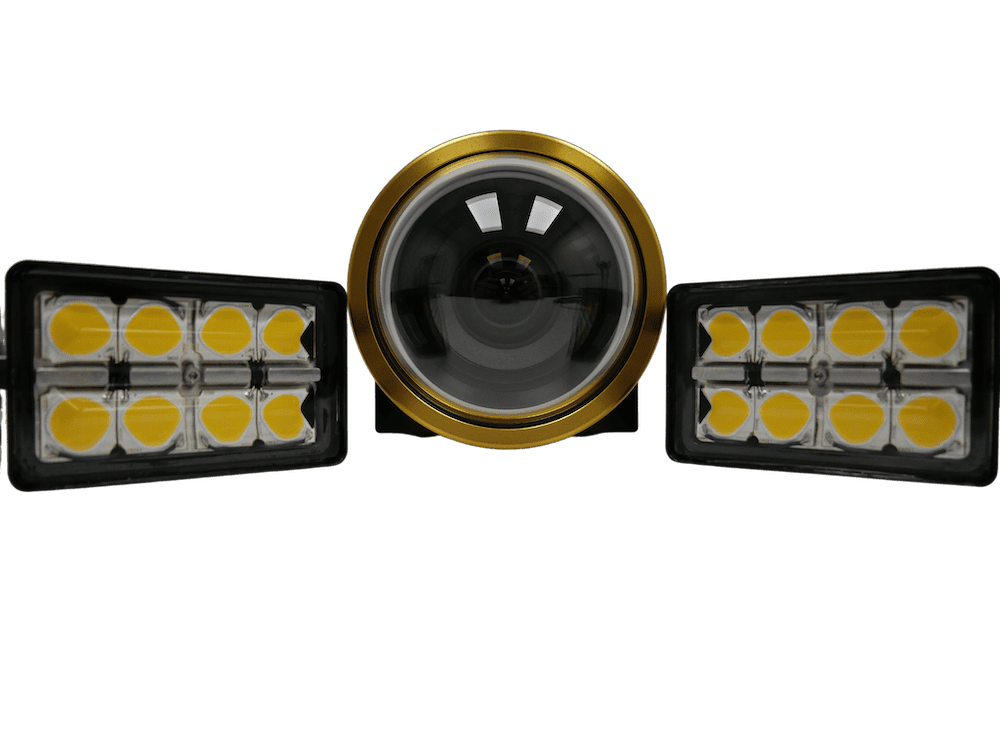
With the recent launch of the Voyis’ Recon AUV payloads, now available on common small AUVs like the HII REMUS 100/600 and L3Harris IVER4, the historic barriers to successful MLO identification on AUVs have now been addressed: Compact performance, simplified integration, and usability. These standard payloads include the Recon 4K Stills Camera and LED strobe, the Recon LS with an integrated 3D subsea laser scanner, and the Complete MCM payload which incorporates the Wavefront multi-aperture side-scan sonar.

Recon LS on a typical small AUV
Compact Performance
Historically, optical sensing from small AUVs has gained a bad reputation. Relying on antiquated video camera technology to record the target, these optical sensors inherently had low resolution, high image blur, and high power draws due to their continuous operation. The Recon products address these challenges by employing a compact high sensitivity stills imaging camera that captures blurless 4K resolution pictures using millisecond exposures. By incorporating cutting-edge LED technology, extremely high output illumination is strobed for short durations which enables imaging at high speed and long-range while minimally impacting vehicle endurance. When combined with miniaturized laser scanning technology, the payload provides both qualitative wide-area image maps and qualitative 3D models of targets.

Torpedo Visual Identification from AUV
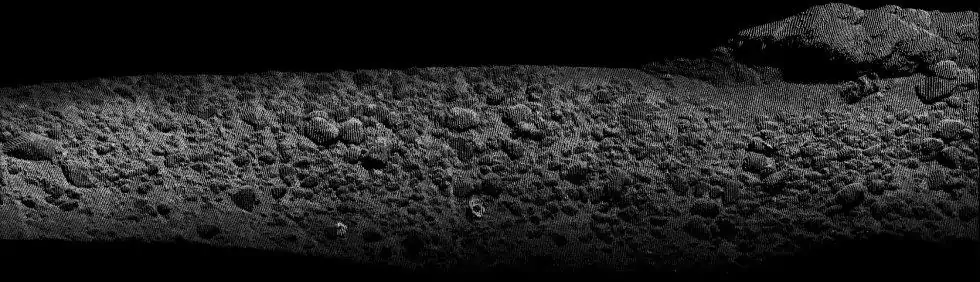
Seabed laser survey from AUV
Integration Complexity
Navies require more than just piecemeal sensors – they require reliable and tightly integrated commercial off-the-shelf (COTS) solutions that can be adopted with minimal change to their current processes. While a research group or survey company may be willing to take on a complex technology integration, navies demand proven payloads. By designing specific modular payloads for each vehicle platform, the Recon enables straightforward upgrades to existing vehicle assets that expand current capabilities, as well as an OEM add-on option when purchasing new platforms. The hydrodynamic modules mount inline with the vehicle using standard mechanical interfaces, connect to existing electrical inputs, and are controlled with the vehicle’s mission planning interface. When used for target reacquisition it has a negligible impact on platform endurance, and all data can be saved to the payload’s onboard hard drive to simplify data management. The vehicle’s navigational data is accessed automatically to geotag images and spatially correct 3D laser data to improve target localization. It has never been easier to add optical survey capabilities to existing AUV assets.

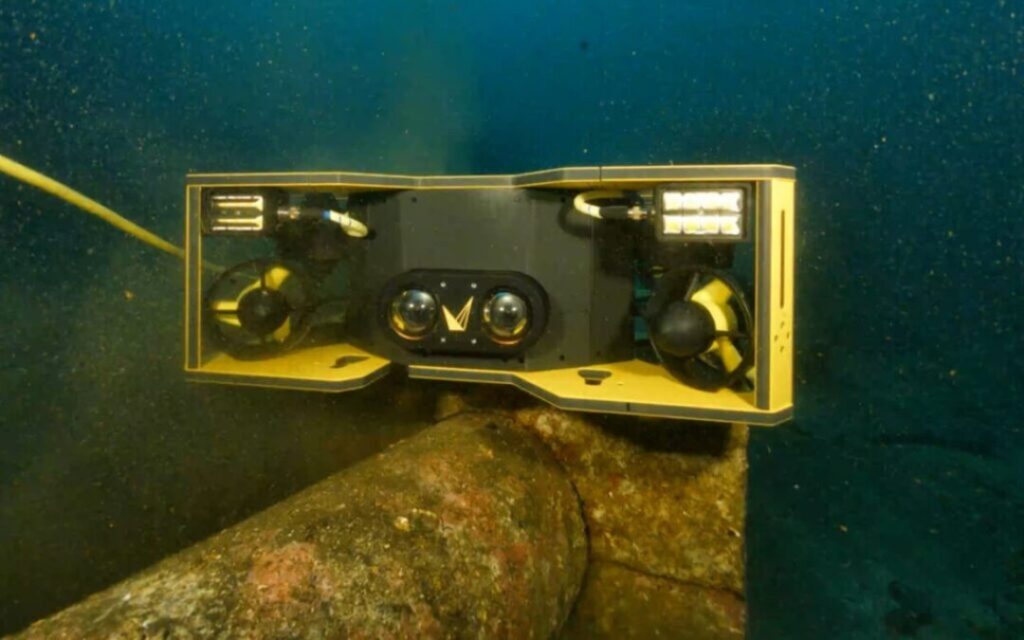
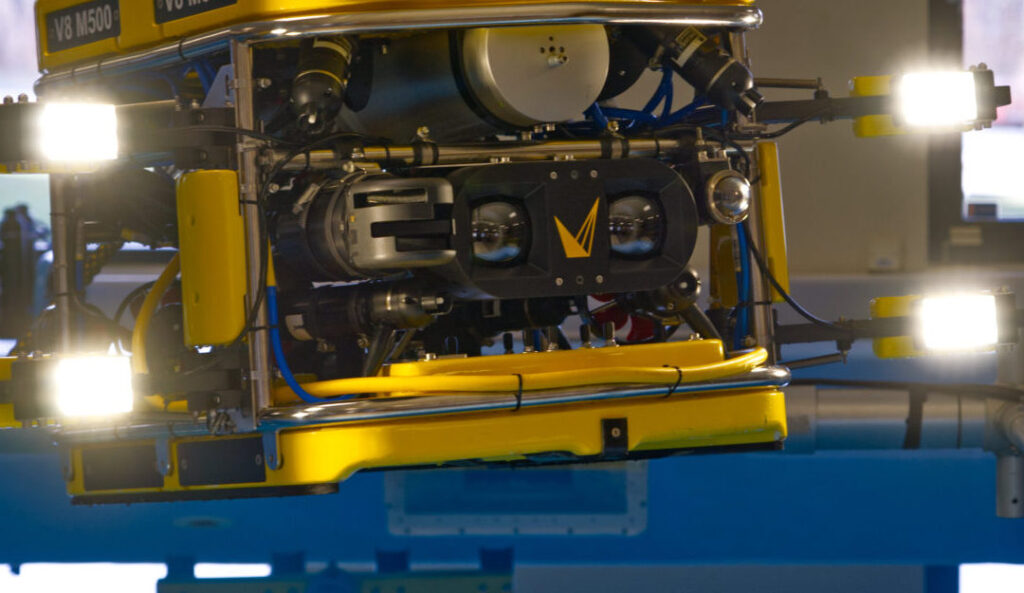
Voyis Recon Payload
Usability
The final aspect is simplifying the data workflow for operators who are often inexperienced in working with large image and laser datasets. The Recon payload’s onboard computing processes all image and laser data in real-time, ensuring the data is available for assessment as soon as the vehicle is recovered. Images are enhanced to correct uneven lighting, enhance contrast, tag GPS locations, and compress file sizes. 3D laser data is generated in real-time using the vehicle’s existing navigational data to produce wide-area 3D models. Once the vehicle is recovered, the Voyis ViewLS software is used to rapidly extract localized target data to increase mission cadence. By inputting a standard sonar target file from the detection stage, only data within the specified radius of possible MLOs are downloaded, reducing both download and analysis time and providing complete situational awareness as soon as possible.

Automated image enhancement
It is a challenging time in the area of underwater warfare. While threats continue to evolve in complexity and covertness, we are also witnessing a new age of subsea robotics and remote sensing that is leading to the rapid adoption of uncrewed platforms which will enhance our soldiers’ safety and effectiveness. Subsea autonomy is complex, and to achieve the future vision of naval mine countermeasure operations it is paramount that sensor developers, vehicle manufacturers, and navies work together to rise to the occasion.