This session highlights the real-world performance of the Voyis VSLAM Powered by EIVA NaviSuite, showcasing its transformative impact on subsea inspections since its launch.
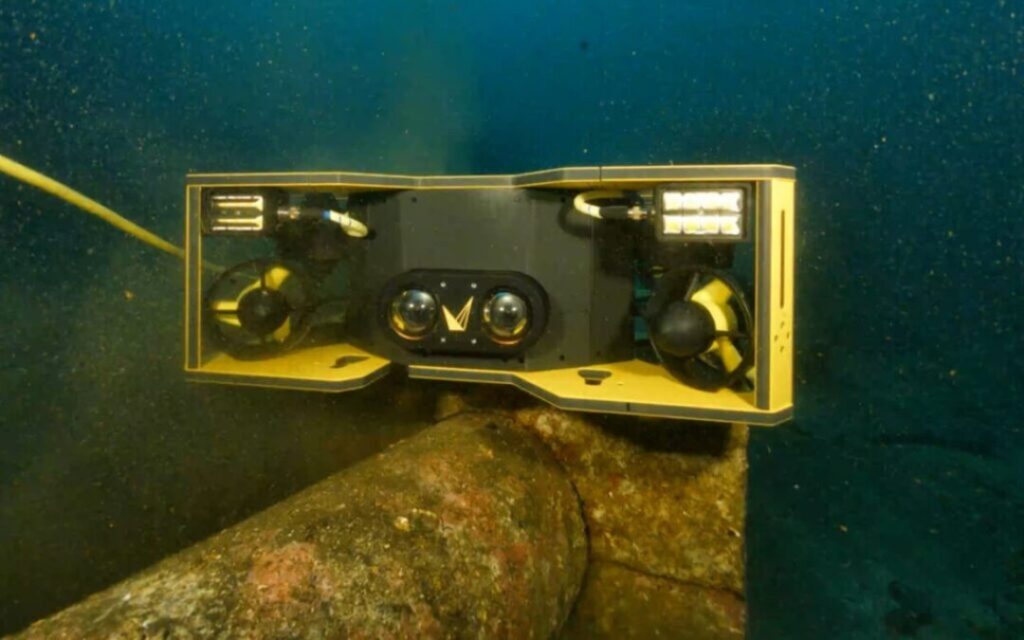
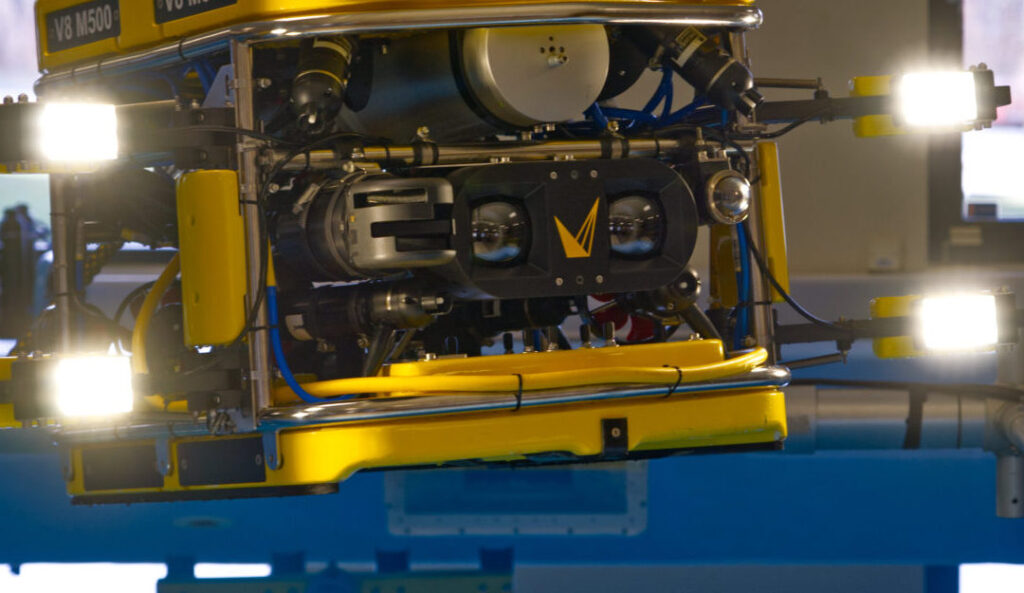
Leveraging Voyis’ Discovery Stereo Camera, this cutting-edge solution provides real-time QC point clouds and trajectory displays in the NaviSuite interface, enabling precise ROV piloting and superior data acquisition in complex underwater environments. This webinar will cover:
- Key challenges and lessons learned from deploying this VSLAM solution in diverse subsea inspection scenarios
- Success stories that demonstrate the practical value of real-time 3D point clouds for quality control and navigation
- A refresher on the core VSLAM algorithm and its seamless integration with Voyis hardware and EIVA software
- Insights into how VSLAM technology improves data reliability and efficiency in offshore operations
- How this solution is paving the way for greater autonomy in subsea robotics
Join Voyis for an engaging discussion blending technical insights and operational achievements from the past six months.