



Discover World-Leading Unmanned and Autonomous Technologies
Discover cutting-edge solutions from leading global suppliersDrone magnetic surveys offer a safe and reliable way of acquiring geophysical data even in the most inaccessible terrain. Drone survey data specialists Hammer Missions discuss the key considerations to using a drone over a helicopter or ground surveys.
Magnetic and other geophysical surveys have always been challenging. Traditionally undertaken using heavy, expensive equipment in hilly & inaccessible areas, options were limited to walking with a ground-based magnetometer (slow) or flying a de-magnetised helicopter (expensive).
Drones have changed the Game
In the last 5 years, drones and airborne magnetometers have changed the game. Now a traditional magnetic survey can be conducted 5x faster and 10x cheaper using a magnetometer-mounted drone. Not only is this option faster and more affordable, but it results in higher resolution data collection as the UAV can be flown much closer to the surface.
Choosing the Right Equipment
1. Equipment: Choose the correct drones, magnetometers, suspension systems, mobile tablets and more.
2. Flight Parameters & Software: Consider the flight parameters and mission planning software. A mineral exploration survey is typically flown 20-30m from the ground level with 50m flight lines and 150-200m tie lines. These would change if you’re flying a UXO survey close to the ground (1-2m AGL), and therefore choosing flight software that can account for this is important. Hammer flight software has mission mode specifically designed for magnetic surveys.
3. Processing Software: Decide how you intend to process the data. Keep in mind that the processing may have to account for the drone noise and the unique flight characteristics of the drone survey.
Site Challenges
Hilly Terrain
Magnetic surveys are rarely conducted over completely flat terrain. It’s important to understand the topology of the target site beforehand, and acquire high-resolution elevation data to study the site. This elevation data can be procured in the form of Digital Elevation Models (DEMs) or Digital Surface Models (DSMs). These are typically raster images representing a site or an area and allow you to visualise the site elevations in a GIS visualisation utility such as QGIS or ArcGIS. The same dataset can also be used to automate the UAV’s flight path so that it follows the terrain at the target site, maintaining a safe distance from the ground whilst ensuring highest quality data.
Takeoff Locations
Pick the most optimal take-off locations. If flying in hilly terrain it can be hard to maintain visibility of the drone at all times if the take-off location too low. Conversely if you choose a location too high, the drone may not be able to fly more than 200m below the takeoff point. Take-off locations govern how efficient the flight will be – particularly if surveying a large area that has been split into multiple smaller blocks. Planning for terrain and take-off locations ahead of time based on the target site can save multiple days of time on site.
Operational Challenges
Drone Configuration
Being a special purpose magnetic survey, it is often not possible to rigidly attach the magnetometer to the body of the drone (as is often the case with other payloads). Attaching the magnetometer close to the drone would mean introducing the drone’s magnetic signature into the captured dataset, thereby introducing noise and reducing the data quality significantly. Instead, the magnetometer is suspended from 2-3m away from the drone using cables.
Takeoff and Landing
Since the magnetometer is in a suspended configuration, the only way to safely take-off and land the drone is under manual control. This would typically involve landing the sensor first, moving the drone to the side and then landing the drone safely away from the sensor. It is important to understand that manual control is only required during take-off and landing. The survey itself should be conducted with flight software that automates the flight path for high-precision data capture.
Suspended Configuration
Flying in too windy conditions is a no go and it is important to use flight automation software that can smooth out any sharp corners in the flight path to reduce pendulum swing of the magnetometer. This is something Hammer Missions can help with. Simply press a button in the mission planning settings and the generated flight path will automatically be smoothened out for best results.
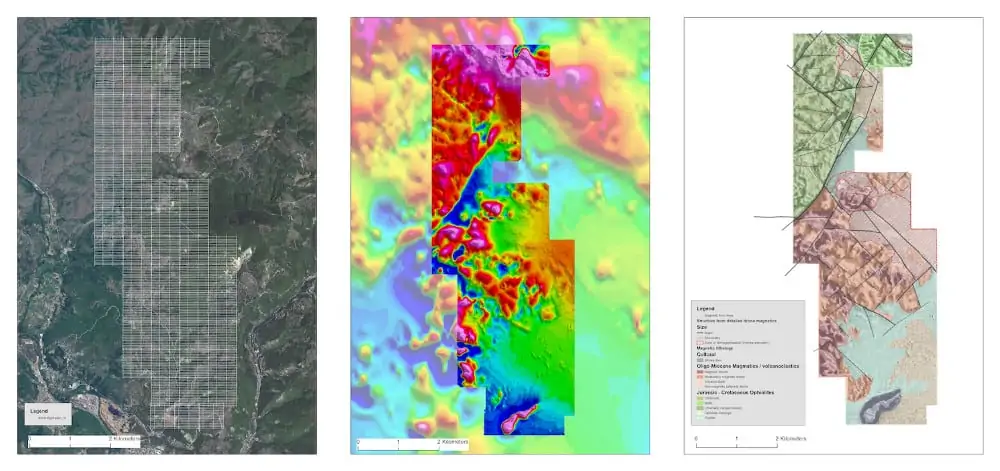
Watch a recent magnetic survey in action followed by analysed results.
Mission Planning Challenges
Terrain Awareness
Does your mission planning software support terrain awareness? More importantly, does it support terrain awareness with imported Digital Elevation Models (DEMs) or Digital Surface Models (DSMs).
With magnetic surveys, inevitably targets are in hilly terrain. In these scenarios, the best approach is to purchase digital elevation models or digital surface models of the target area and import them into your mission planning software. The software needs to work completely offline and correctly calculate the flight path by taking the terrain into account.
Area Splitting
In case of surveying a large area (1sq. km+), battery constraints on the drone and regulatory constraints on the flight envelope (500mx500m in most countries), requires the splitting of the area into smaller blocks and surveying them separately. It’s important to have enough overlap between the smaller blocks and identical flight parameters so that results can be stitched together into a single picture. Hammer software ensures that when you change the flight parameters in one block, they are automatically copied over to all blocks so that all flights have the same flight parameters (line spacing for e.g.) for easy stitching later.
Flight Line & Tie Line Spacing
As with a traditional magnetic survey, it is important to understand the geophysical signature of the target, the capabilities of the magnetic sensor and therefore calculate the best line spacing for your project. The same applies to tie line spacing. Hammer recommend working with a geophysicist to understand the best spacing for your project. Once you have an understanding of the line spacing, you can input the spacing as a parameter into the flight software.












