Ascend Engineering, a leader in customized UAV autopilot software, has expanded the capabilities of the PX4 open-source autopilot system, by integrating a new feature that enables the Holybro ZED-F9P to determine heading using dual GPS for DroneCAN.
The original PX4 feature for dual heading was programmed by Alex K at Ark Electronics. Following sponsorship by Holybro, Ascend Engineering have now added AP Periph support to PX4 DroneCAN in order to enable the Holybro ZED-F9P to use dual GPS for heading. This contribution strengthens the versatility of PX4 for diverse UAV platforms, including multirotor, fixed-wing, and unmanned helicopters.
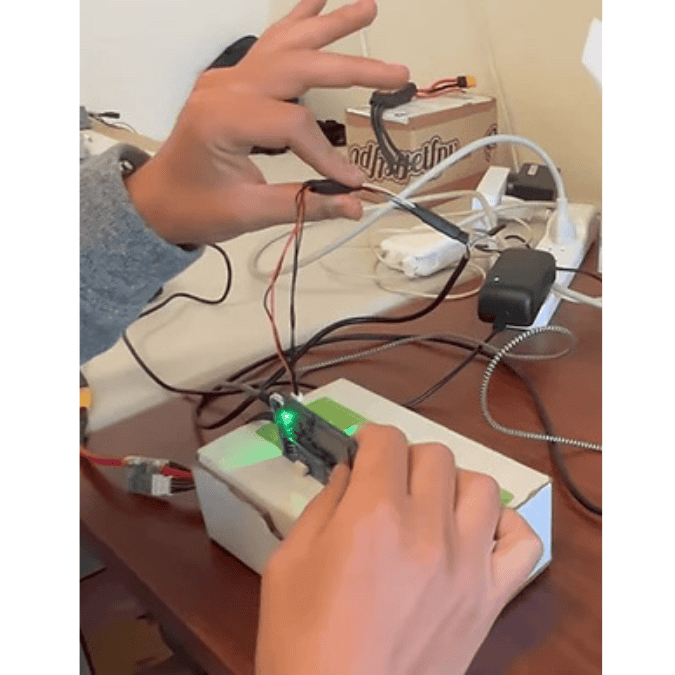
Using Dual GPS sensors enables users to calculate heading when the compass is near large metal objects or machinery and therefore is degraded. The Dual GPSs in the PX4 autopilot stack allows for extremely accurate and repeatable turns whereas a compass does not. This makes a dual antenna setup ideal for surveying and urban inspection applications.
Ascend Engineering’s newly contributed feature for PX4 autopilot stack integrates these new GPS units into the Holybro ZED-F9P DroneCAN GPS driver, in order to provide end users with a more seamless setup experience before testing and flying.

H-RTK ZED-F9P Rover by Holybro
Key Features:
- Dual GPS Heading Support: Enables UAVs to establish their heading using two GPS receivers, enhancing navigational accuracy.
- Seamless Integration: Works with existing PX4 systems and DroneCAN GPS for efficient upgrades.
Ascend Engineering offers specialized software engineering consultancy, focused on the unmanned aerial systems industry. The company provides a full range of development services for government and commercial clients seeking to leverage cutting-edge drone technology to enhance and elevate their operations.