



GPS/GNSS Products
Discover cutting-edge solutions from 19 leading global suppliers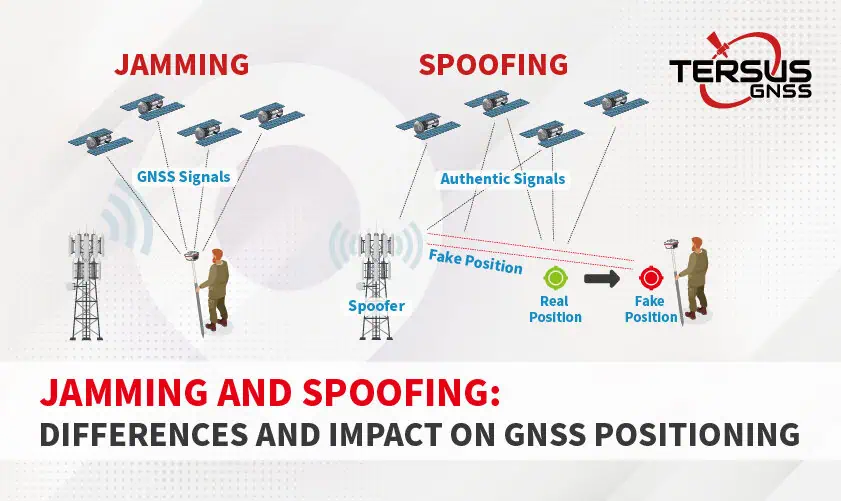
In the blog post Jamming and Spoofing: Differences and Impact on GNSS Positioning, Tersus GNSS examines how Global Navigation Satellite Systems (GNSS), including GPS, GLONASS, Galileo, and BeiDou, are essential to applications that depend on accurate positioning, navigation, and timing.
These systems are vulnerable to both intentional and unintentional interference.
Two primary threats are jamming and spoofing, which disrupt GNSS receiver performance through different mechanisms. This document provides a technical overview of each threat, examines their impact on GNSS reliability, and outlines mitigation techniques used to address them.
Jamming Definition and Mechanism
Jamming is the emission of high-power radio frequency (RF) signals within GNSS bands that interfere with the reception of legitimate satellite signals. These interfering signals, whether intentional or accidental, typically consist of broadband noise (e.g., white noise or modulated tones) and raise the noise floor above the receiver’s detection threshold.
Objectives
The goal of jamming is to deny GNSS service by preventing the receiver from acquiring or tracking valid satellite signals.
Effects on GNSS Operation
- In high-power jamming scenarios, the receiver may lose all satellite signals, resulting in complete positioning failure.
- In lower-power conditions, jamming reduces the signal-to-noise ratio (SNR), causing degraded accuracy and position drift.
- Timing services that rely on GNSS can also be affected, leading to errors in synchronization-dependent systems.
Detection Characteristics
Jamming is typically identifiable by monitoring signal strength degradation, elevated background noise levels, loss of satellite lock, or consistent failures in position computation.
Spoofing
Definition and Mechanism
Spoofing involves transmitting false GNSS-like signals that mimic legitimate satellite transmissions. These counterfeit signals are crafted with manipulated timing and navigation data to deceive the receiver into producing incorrect outputs.
Objectives
The primary aim of spoofing is to mislead a GNSS receiver into calculating a false position or time, without the receiver recognizing the data as invalid.
Effects on GNSS Operation
- The receiver may compute an erroneous position that appears plausible, leading to undetected navigation errors.
- In systems that use GNSS as a time reference (e.g., financial networks, telecommunications, power grids), spoofing can introduce incorrect timing data, potentially affecting synchronization.
- Spoofing also presents a risk to autonomous or unmanned systems that rely heavily on GNSS, especially if no cross-validation with other onboard sensors is used.
Detection Characteristics
Spoofing is often difficult to detect, particularly when the counterfeit signals are closely synchronized with real ones and replicate expected satellite behavior. Simpler spoofing attacks may be detectable, but high-fidelity spoofing typically requires advanced detection techniques such as cryptographic signal authentication, Doppler analysis, or cross-checks with inertial sensors or other navigation data sources.
Impact Assessment
Jamming Impact
- Obstructs GNSS signal acquisition and tracking.
- Results in degraded positioning performance or complete service loss.
- Disrupts operations in critical domains such as aviation, maritime transport, and defense systems.
Spoofing Impact
- Introduces undetected positional or temporal errors.
- Can lead to incorrect system behavior in navigation or synchronization-dependent applications.
- Enables potential exploitation in adversarial contexts, including misdirection, hijacking, or system manipulation.
Mitigation Techniques
Anti-Jamming Measures
- Filtering: Adaptive or notch filters suppress specific interference frequencies.
- Antenna Techniques: Directional antennas, such as Controlled Reception Pattern Antennas (CRPAs), reduce susceptibility to off-axis interference sources.
- Sensor Integration: Combining GNSS with inertial navigation systems (INS) allows continued operation during GNSS outages.
Anti-Spoofing Measures
- Signal Authentication: Use of features like Galileo’s Open Service Navigation Message Authentication (OSNMA) to validate signal origin.
- Multi-Frequency and Multi-Constellation Use: Employing signals from multiple GNSS constellations and bands (e.g., L1, L5; GPS and Galileo) enhances resistance to spoofing.
- Receiver-Based Detection: Algorithms that monitor signal strength variations, Doppler shifts, and consistency across measurements can help detect spoofing attempts.
Conclusion
Jamming and spoofing each pose significant but distinct risks to GNSS-dependent systems. Jamming primarily causes service denial through interference, while spoofing operates through signal deception. Accurate detection and mitigation require a combination of technologies including filtering, directional antennas, cryptographic validation, and multi-sensor integration. As GNSS continues to underpin critical infrastructure and autonomous systems, maintaining resilience against both threats is essential for operational reliability.











