Discover World-Leading Unmanned and Autonomous Technologies
Discover cutting-edge solutions from leading global suppliersClearpath Robotics announced today that they have partnered with Kinova Robotics as the exclusive North American distributor of their internationally recognized JACO Robot Arm. This partnership also brings ROS integration to the JACO Robot Arm to help advance the manipulation research community.
“We’re excited to work with Clearpath Robotics and provide our partners with the JACO Robot Arm,” said Charles Deguire, Chief Executive Officer at Kinova Robotics. “This partnership will help bring high quality manipulator research solutions to our research customers.”
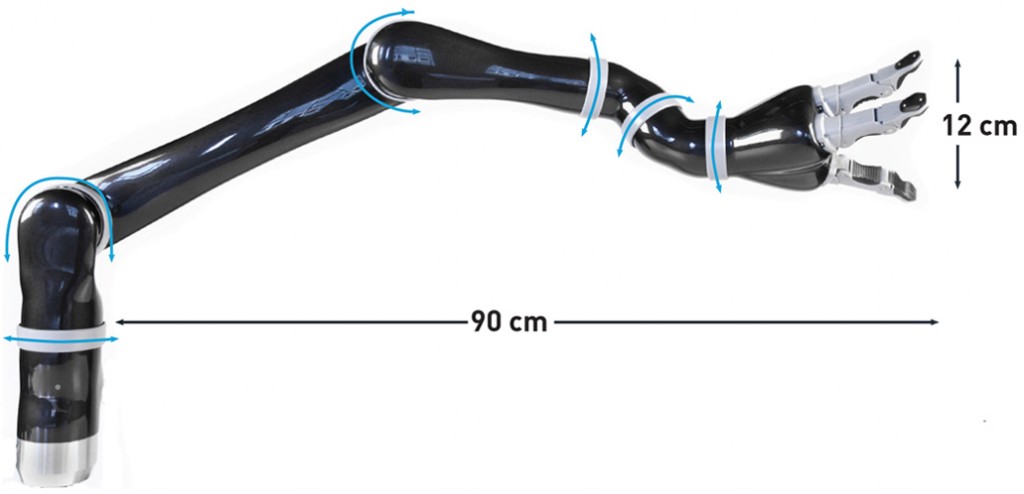
The JACO Robot Arm is ideally suited for advanced mobile manipulation, human-robot interaction and manipulator control system research. JACO is light-weight, power efficient and inherently safe – enabling researchers to interact with their research environment safely and effectively. JACO can also be easily outfitted as a manipulator upgrade to Clearpath Robotics’ industry-standard Husky Unmanned Ground Vehicle.
“Manipulators and mobile robots are a natural fit for integration. We are thrilled to partner with Kinova to offer advanced mobile manipulation research systems. We are both recognized experts in our respective fields, so we know our customers will be as excited as we are about this partnership,” said Matt Rendall, Chief Executive Officer at Clearpath Robotics.
JACO Robot Arm is now available at Clearpath Robotics and additional details can be found at http://www.clearpathrobotics.com/jaco. The ROS driver for the JACO Robot Arm is available for free at https://github.com/Kinovarobotics/jaco-ros.