



Mission Planning Software
Discover cutting-edge solutions from 7 leading global suppliers
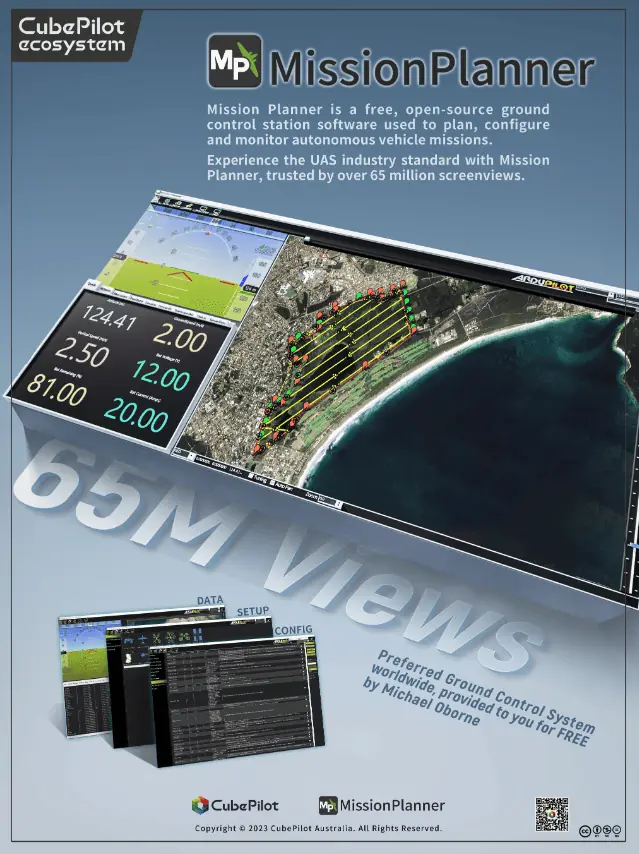
Part of the CubePilot Ecosystem, Mission Planner created by Michael Oborne, is a full-featured ground station application for the ArduPilot open source autopilot project.
Considered by many to be the UAS industry standard, Mission Planner is trusted by operators around the world, as demonstrated by over 65 million screenviews.
Used to plan, configure and monitor autonomous vehicle missions, Mission Planner is compatible with Windows and Android. It is free to download.
Features include:
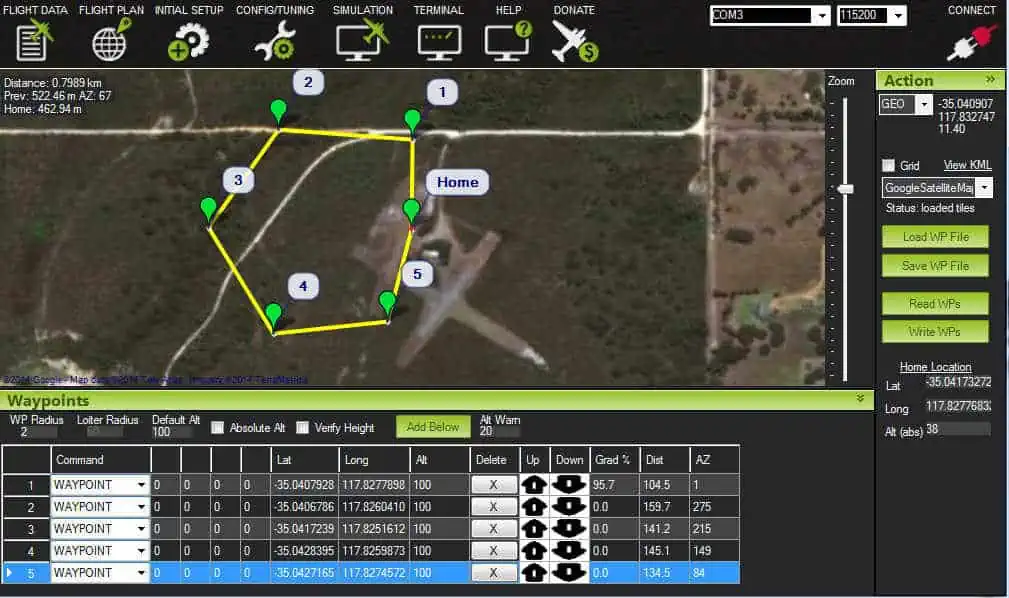
- Point-and-click waypoint/fence/rally point entry, using Google Maps/Bing/Open street maps/Custom WMS
- Select mission commands from drop-down menus
- Download mission log files and analyze them
- Configure autopilot settings for your vehicle
- Interface with a PC flight simulator to create a full software-in-the-loop (SITL) UAV simulator
- Run its own SITL simulation of many frames types for all the ArduPilot vehicles
With appropriate telemetry hardware, Mission Planner can also be used to setup, configure, and tune unmanned vehicles for optimum performance, monitor vehicle status whilst in operation, operate FPV (first person view), and view, analyze and record telemetry logs which contain much more information than on-board autopilot logs.












