



Underwater Communication Systems
Discover cutting-edge solutions from leading global suppliers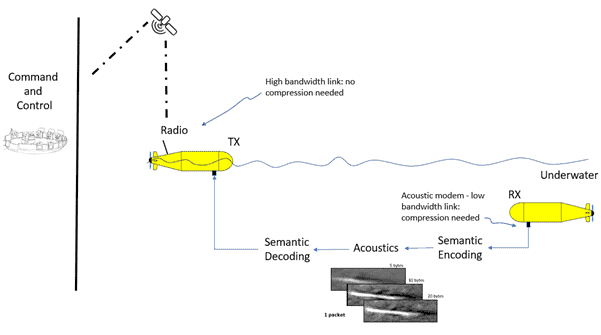
SeeByte, a global leader in developing smart software solutions for unmanned maritime systems have successfully linked autonomy and communications to maximise the information that can be transferred in communications-limited scenarios.
SeeByte was awarded the work under the Defence and Security Accelerator (DASA) Autonomy in Challenging Environments Phase 1. The aim of the project, coined CARUSO, was to deliver a step change in autonomy systems, integrating communication and sensing performance directly into the autonomy problem.
The need for Autonomous Underwater Vehicles (AUV’s) to operate in highly complex, variable, and comms-limited environments requires effective autonomy and high performance underwater communications standards. Developing behaviours that can exploit an increased level of real-time environmental awareness will allow robots to maximise their in-field persistence and operational effectiveness.
Strengthening the bond between human and machine, robots will optimise the use of underwater communications, prioritising what information to report to command and control to support important decision making.
Andrea Munafo, Engineering Manager at SeeByte said,
“CARUSO demonstrated that the integration of communications performance directly into the autonomy problem is key for the next generation of marine autonomy: robots can make decisions to maximise operator awareness and to ensure quick human-robot re-synchronisation when communications falter.”
SeeByte’s Commercial Manager, Alastair Cormack added,
“this project has enabled SeeByte to extend its autonomy capability; integrating CARUSO technology with our proven mission-level autonomy software, Neptune, has opened up new opportunities for our technology and commercial applications”.







