




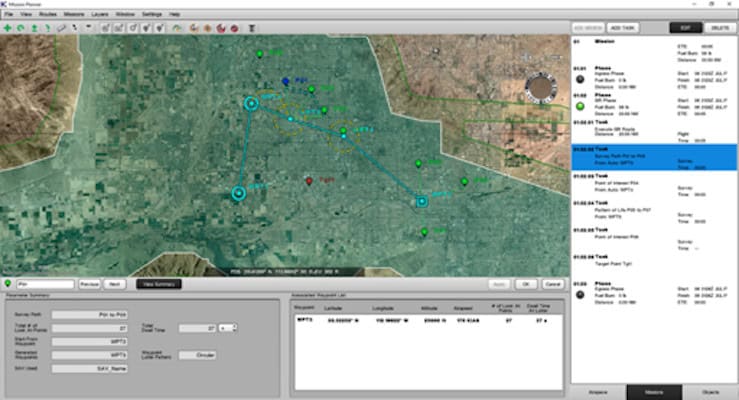
Kutta Technologies' Mission Planner software has been designed to automate much of the manual planning associated with UAV-based intelligence, surveillance and reconnaissance operations, utilizing open interfaces for seamless integration into existing ISR systems. Operators can quickly define high-level tasks such as roads and areas to survey, as well as surveillance, loiter and rally points, and the software will automatically calculate the optimal stand-off loiter and sensor stare points.
The software analyzes the line-of-sight range of ground-based radio signals to coordinate efforts between fixed and mobile ground control stations. Mission Planner can also automatically route around no-fly zones, compute mission times, and output easily readable flight-test cards in PDF format for operators as well as digital visual reference files for onboard systems to utilize.





