General Dynamics Mission Systems has announced that it has featured the Bluefin Robotics hovering-autonomous underwater vehicle (H-AUV) at the OCEANS 2016 conference in Monterey, California. The Bluefin Robotics H-AUV locates, identifies and maps structural issues on a ship’s hull including large ocean going cargo ships, petroleum and chemical tankers, cruise ships and military surface and sub-surface vessels without dry-docking the ship.
“Inspecting ship hulls and other underwater surfaces can be a manpower- and cost-intensive part of a ship’s observation and maintenance,” said Matt Graziano, director of Autonomous Undersea Systems for General Dynamics Mission Systems. “This H-AUV also reduces the risk to divers when inspecting potential threats attached to a ship’s hull or other structure.”
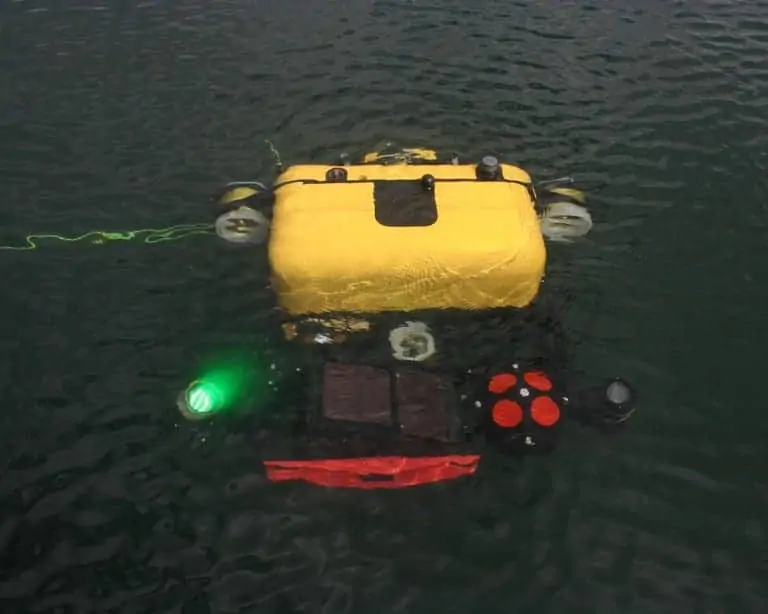
The Bluefin Robotics H-AUV operates autonomously and navigates along a hull, bridges or piers. High-resolution images are streamed, recorded and stored by the H-AUV for shipboard or shore-based operators to observe in real time, or study once the scan is complete. The H-AUV can also conduct undersea observation for port and harbor security, underwater law enforcement investigations, archeological and academic research.
General Dynamics Mission Systems develops, builds and operates a portfolio of Bluefin Robotics Autonomous Underwater Vehicles (AUVs) and related technologies for defense, commercial and academic customers worldwide.